Self-adaptive cotton harvesting method based on binocular vision recognition and intelligent mechanical harvesting device
A technology of binocular visual recognition and harvesting device, which is applied in the field of intelligent mechanical harvesting devices, can solve the problems of easily pinching the calyx, increasing the cotton doping rate, and reducing the cotton quality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
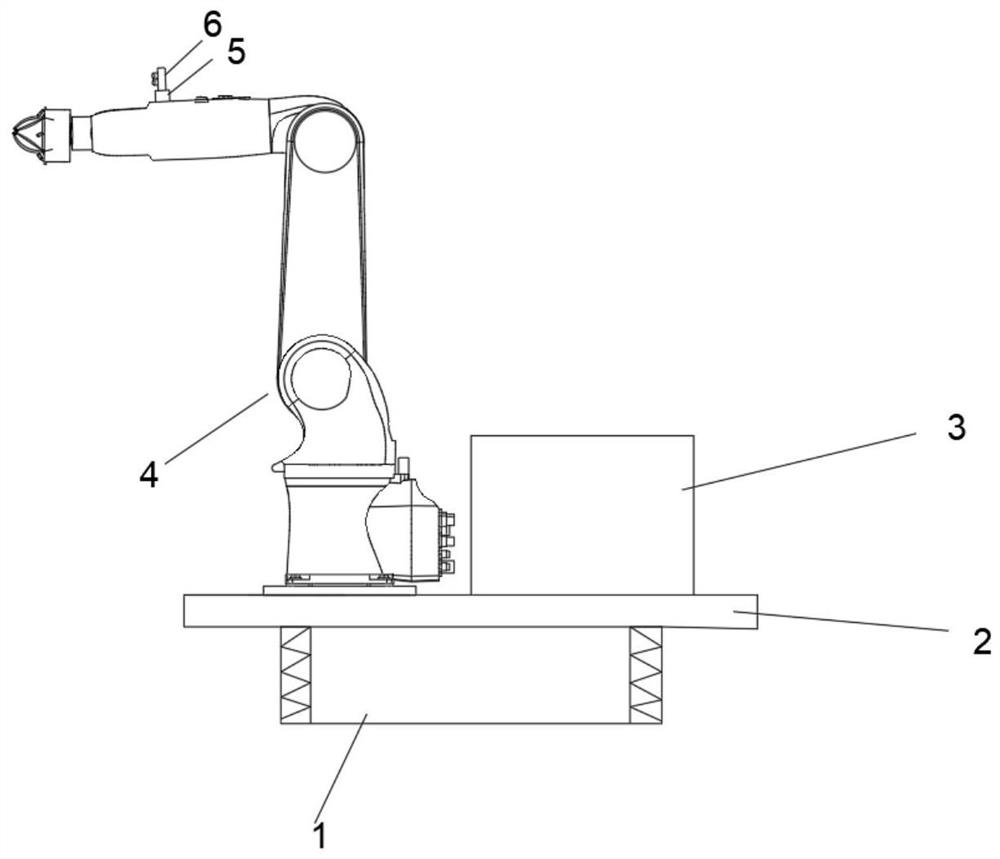
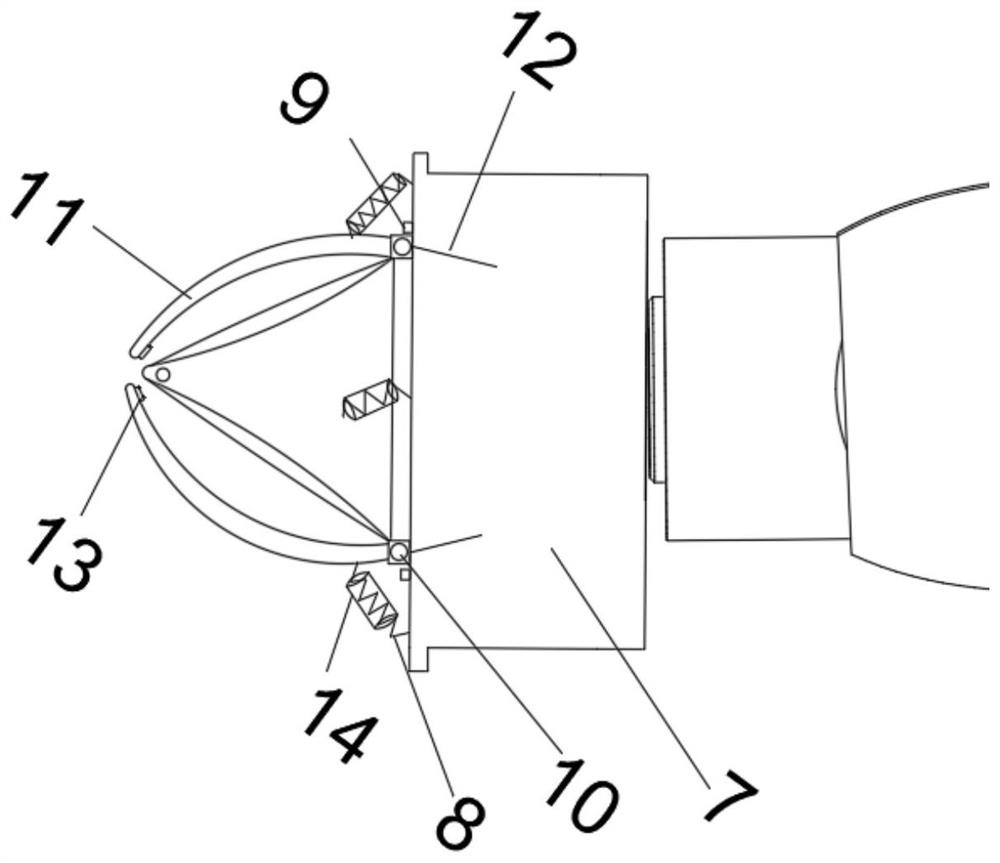
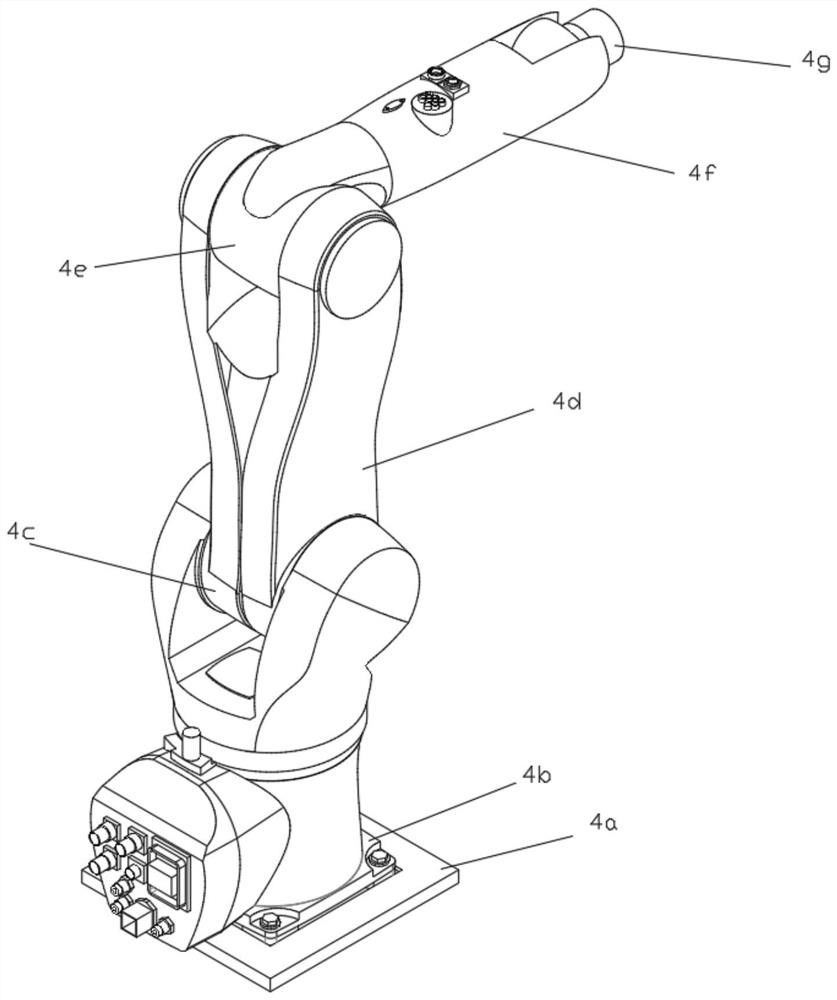
[0048] Such as figure 1 As shown, the self-adaptive cotton intelligent mechanical harvesting device with binocular vision recognition includes a mobile crawler tractor 1, a support plate 2 connected to the tractor, and a cotton collection box 3 and a mechanical arm 4 are carried on the support plate 2. The mechanical arm consists of Composed of multiple joint components (such as image 3 As shown), the camera support frame 5 is installed on the forearm of the mechanical arm, the binocular camera 6 is installed on the support frame 5, and the cotton picking components are carried on the end effector of the mechanical arm. Such as figure 2 , Figure 4 As shown, the cotton picking parts include cotton storage 7, compression spring 8, motor 9, joint movable hinge 10, bionic elastic flexible mechanical claw 11, flexible baffle 12, suction cup 13, bionic elastic flexible mechanical claw passes through the hole and Joint hinge connection, the joint hinge is used to limit the degr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com