

Intelligent autonomous navigation underwater detection robot
An intelligent, autonomous and robotic technology, applied in the directions of underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problems of lack of monitoring methods in the water area, and achieve improved detection accuracy and convenience, flexible motion control, and flexible operation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] To make the objectives, technical solutions and advantages of the present invention will become more apparent hereinafter in conjunction with the accompanying drawings and embodiments of the present invention will be further described in detail. It should be understood that the specific embodiments described herein are merely used to explain the present invention and are not intended to limit the present invention.
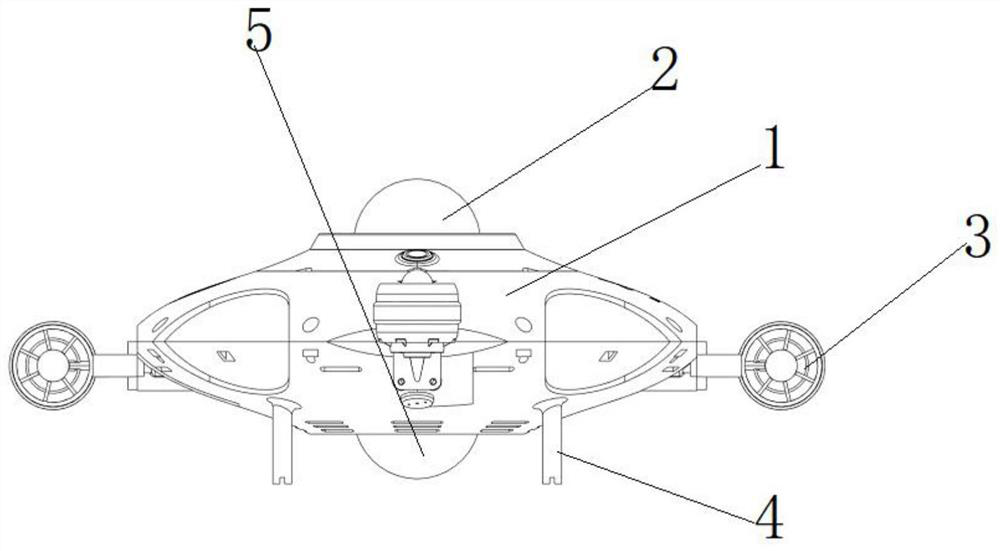
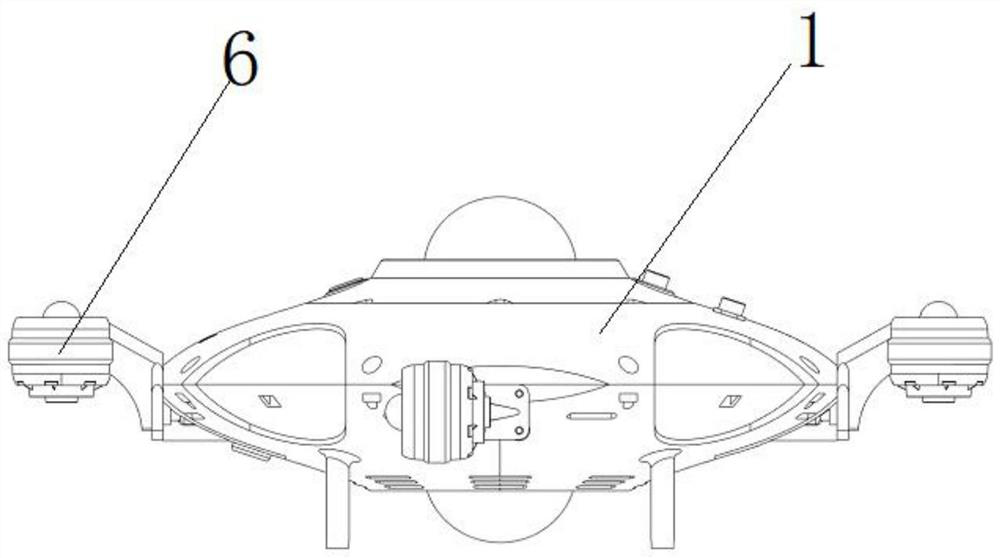
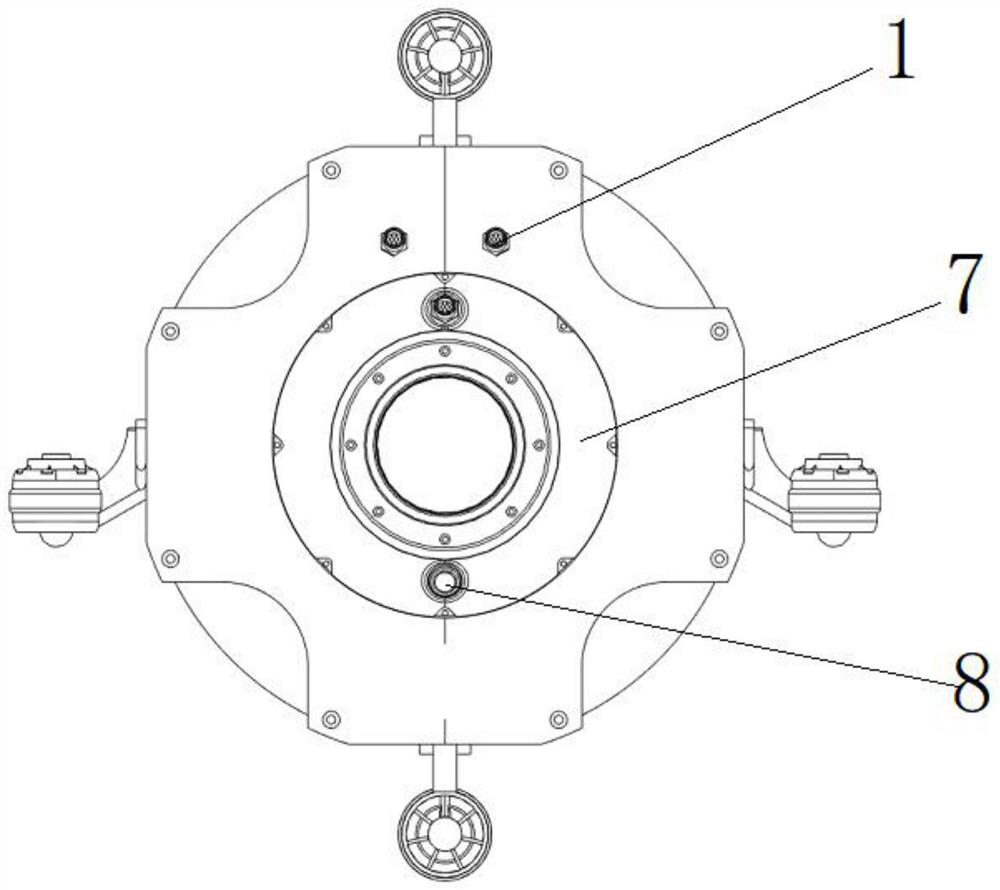
[0039] Refer Figure 1-5An intelligent autonomous navigation underwater inspection robot, including an aircraft body 1, wherein: the top of the vehicle body 1 is fixedly attached to an upper portion of the camera 2, a bottom surface at the center of the aircraft body 1 is provided with a lower portion of the camera 5, the aircraft body 1 the left and right sides of the lower surface of the lower portion of the camera 5 is fixedly mounted water quality monitoring sensor 4; number of water quality monitoring sensor 4 is two, the bottom end of the water quality mon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More