Robot obstacle avoidance system based on safety reinforcement learning and visual sensor
A visual sensor and reinforcement learning technology, applied in control/regulation systems, instruments, two-dimensional position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
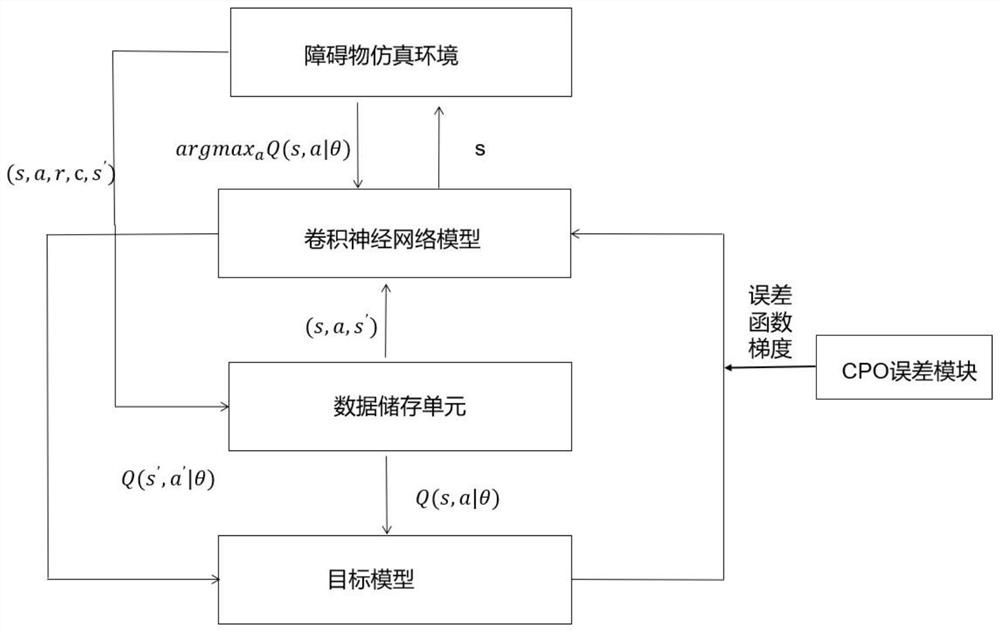
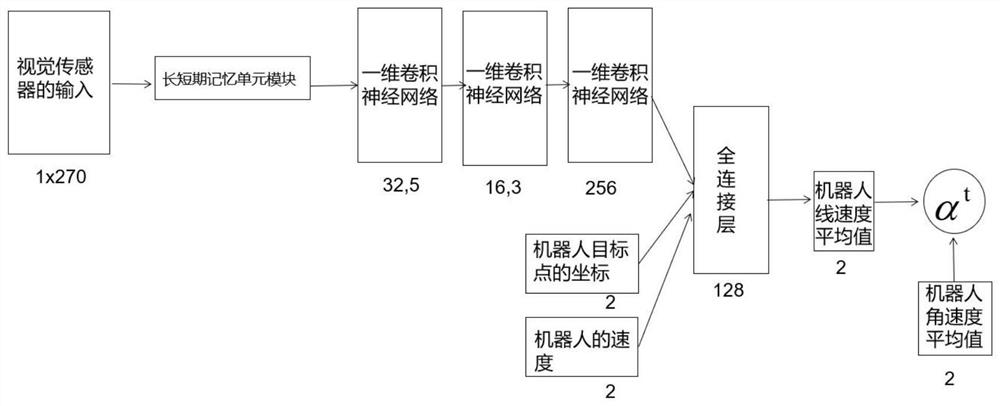
[0096] Example analysis: For example, to complete the process of charging the intelligent sweeping robot back to the seat: in the construction of the model training module, we can first build a virtual obstacle simulation environment on the gym, that is, configure the obstacles that may appear during the process, such as Randomly placed chairs and tables in the living room; set up the initial convolutional neural network model, in which the first convolutional layer uses 32 one-dimensional convolutional kernels with a size of 5 and a step size of 2. This layer uses ReLU is used as the activation function. The second convolutional layer uses 16 one-dimensional convolutional kernels of size 3 and stride 2 for further feature extraction, using two fully connected layers with 256 units and 128 units respectively. The activation function used by the two fully connected layers is also ReLU, and the final output layer uses sigmoid and tanh as the activation function for the linear ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com