

Real-time track obstacle detection method based on three-dimensional point cloud
A technology of obstacle detection and 3D point cloud, applied in radio wave measurement system, image data processing, instrument, etc., can solve problems such as lack of spatial information, camera is easily affected by environmental factors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
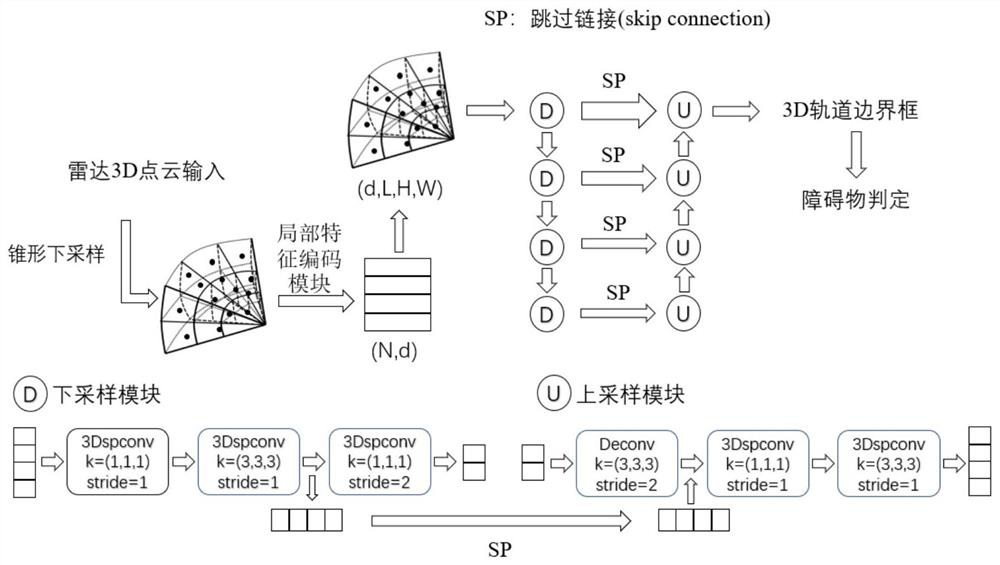
[0036] Further illustrate technical scheme of the present invention below in conjunction with accompanying drawing, flow chart of the present invention is as follows image 3 shown.
[0037] The present invention is a real-time track obstacle detection method based on a three-dimensional point cloud, and the specific steps are as follows:
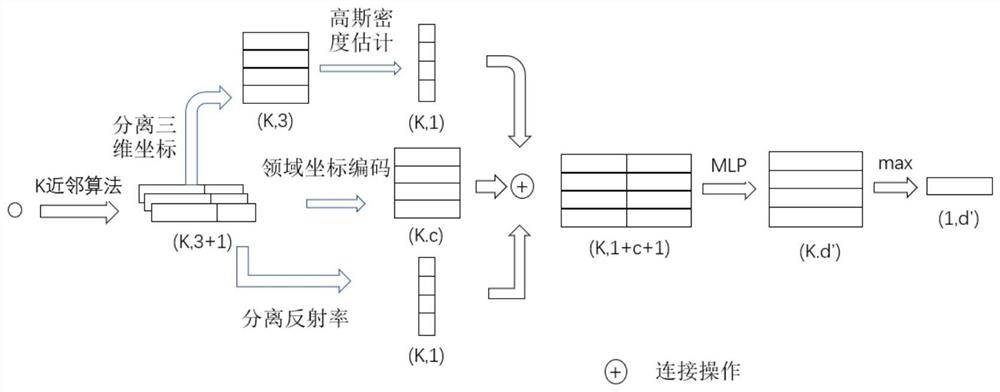
[0038]Step 1: Carry out coordinate transformation on the real-time 3D lidar point cloud data, convert the point cloud coordinates in the European coordinate system to the coordinates in the spherical coordinate system, the coordinate representation is shown in Figure 4, and use the cone division method for the point cloud sampling. The coordinate relationship before and after transformation is shown in formula (1), where α represents the elevation angle on the XOY plane with respect to the Z axis from the left view, β represents the horizontal direction angle of the XOY plane from the top view, and γ represents the distance between the ori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More