

Knee joint exoskeleton rehabilitation training wheelchair
A technology for rehabilitation training and knee joints, which is applied in the field of rehabilitation robots, can solve the problems of limited freedom of movement, inability to resist impact force, and large exercise load of patients, so as to achieve the effect of reducing peak power, smooth output, and reducing knee joint load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the accompanying drawings.
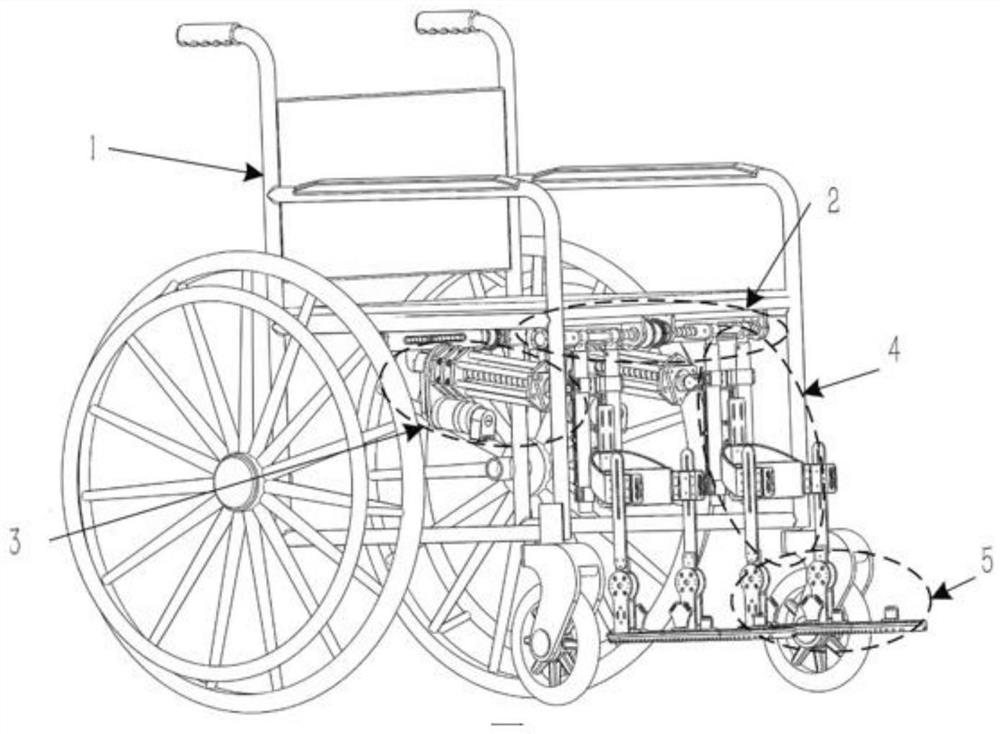
[0036] The invention aims at a knee joint exoskeleton rehabilitation training wheelchair. The overall structure is as follows: figure 1 As shown, it includes 1-wheelchair, 2-double knee width adjustment mechanism, 3-knee joint power mechanism, 4-knee joint internal / external rotation and calf length adjustment mechanism, 5-ankle joint and foot structure. The lower part of the wheelchair with the symmetrical arrangement of the knee joint exoskeleton on both sides does not occupy the space used by the patient, and at the same time, it can realize the synchronous movement of the knee joints on both sides, cross coordinated movement, power-assisted movement, follow movement, resistance movement and other multi-modal movements.
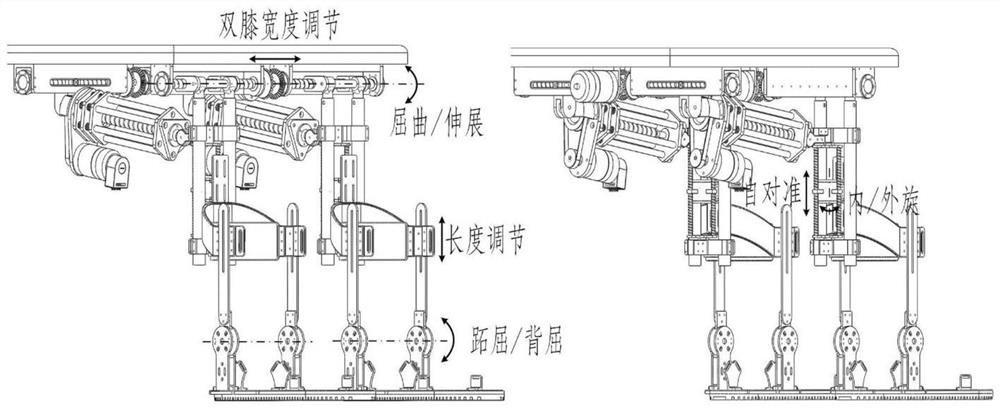
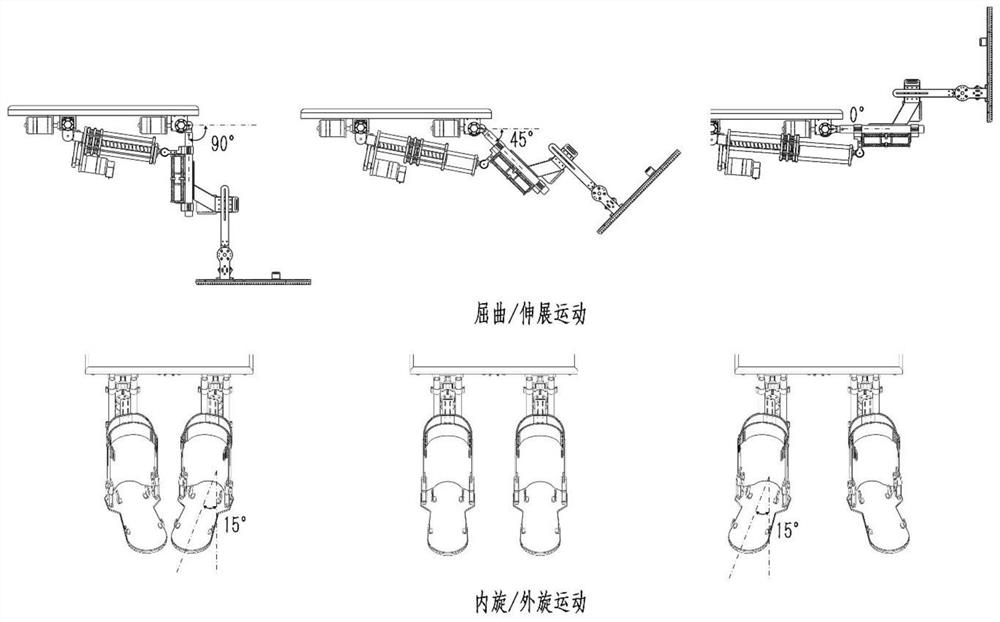
[0037] The degrees of freedom of the knee exoskeleton rehabilitation training wheelchair are as follows figure 2 As shown, it has 6 deg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More