Modular composite robot
A robotic and modular technology, applied in the field of robotics, can solve problems such as poor flexibility, limited usage scenarios, and single function, and achieve the effects of reducing energy consumption, reducing foot end inertia, and improving movement speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be described in detail below with reference to the accompanying drawings and examples.
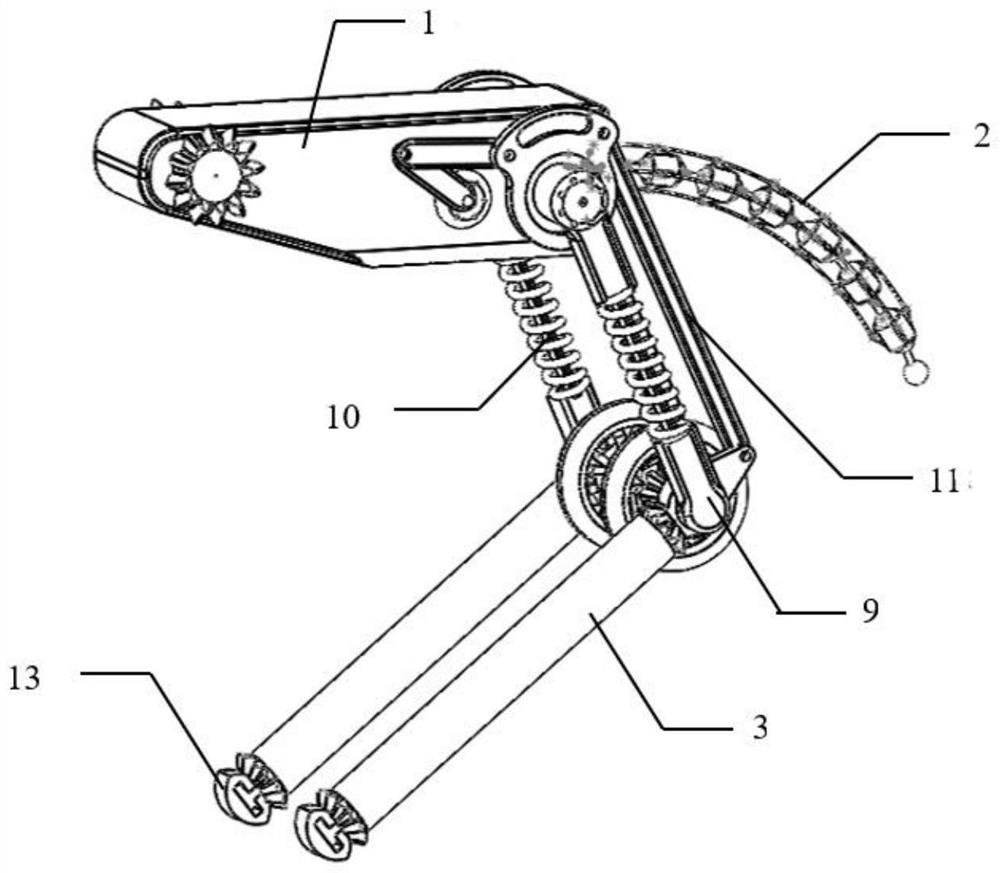
[0060] The invention provides a modular composite robot, such as figure 1 As shown, the robot includes: an operating arm module, a tail structure 2 and a biped module that can walk independently;
[0061] Such as Figure 11 As shown, the operating arm module includes two mechanical arms 32 and a splicing fuselage 33, and the two robotic arms 32 are respectively fixedly connected to both sides of the splicing fuselage 33.
[0062] Such as figure 1 As shown, the bipedal module includes a fuselage 1 and two legs symmetrically installed on both sides of the fuselage 1; the rear end of the fuselage 1 and the Figure 11 Both ends of the spliced fuselage 33 shown are provided with connection structures for fixed connection with the tail vertebra structure 2 . In a specific embodiment, the link structure may be a thread structure.
[0063] Such as Image 6...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More