

Robot movement method and device and electronic equipment
A robot movement and robot technology, applied in the direction of motor vehicles, transportation and packaging, instruments, etc., can solve the problems of discontinuous and unclear obstacle avoidance planning, high sensor system requirements, map and positioning, etc., to achieve fast and accurate obstacle avoidance function , Low requirements, continuous and clear obstacle avoidance planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
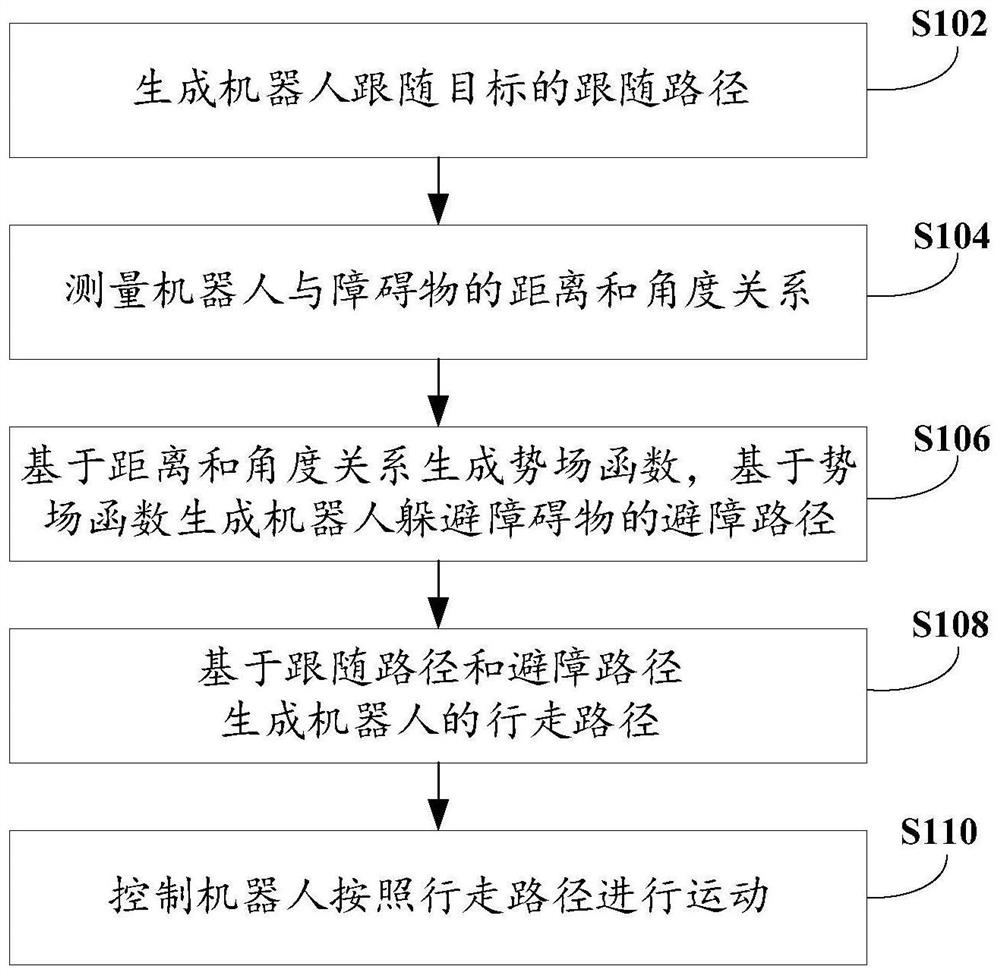
[0040] This embodiment provides a robot movement method, which is applied to the scene where the robot moves following the target, and the scene includes at least one obstacle, see figure 1 The flow chart of a kind of robot movement method shown, this robot movement method comprises the steps:
[0041] Step S102, generating a following path for the robot to follow the target.
[0042] The robot in this embodiment can be understood as a device with the function of following a target, for example: various service robots. The target of this embodiment may be a person or an object, and the following in this embodiment will take a person as an example, and details will not be described hereafter. The following path is used for the robot to follow the target. It can be understood as the path for the robot to move towards the target. The following path does not consider whether there are obstacles in the path, that is, it will not avoid obstacles. If the robot follows the target alo...
Embodiment 2
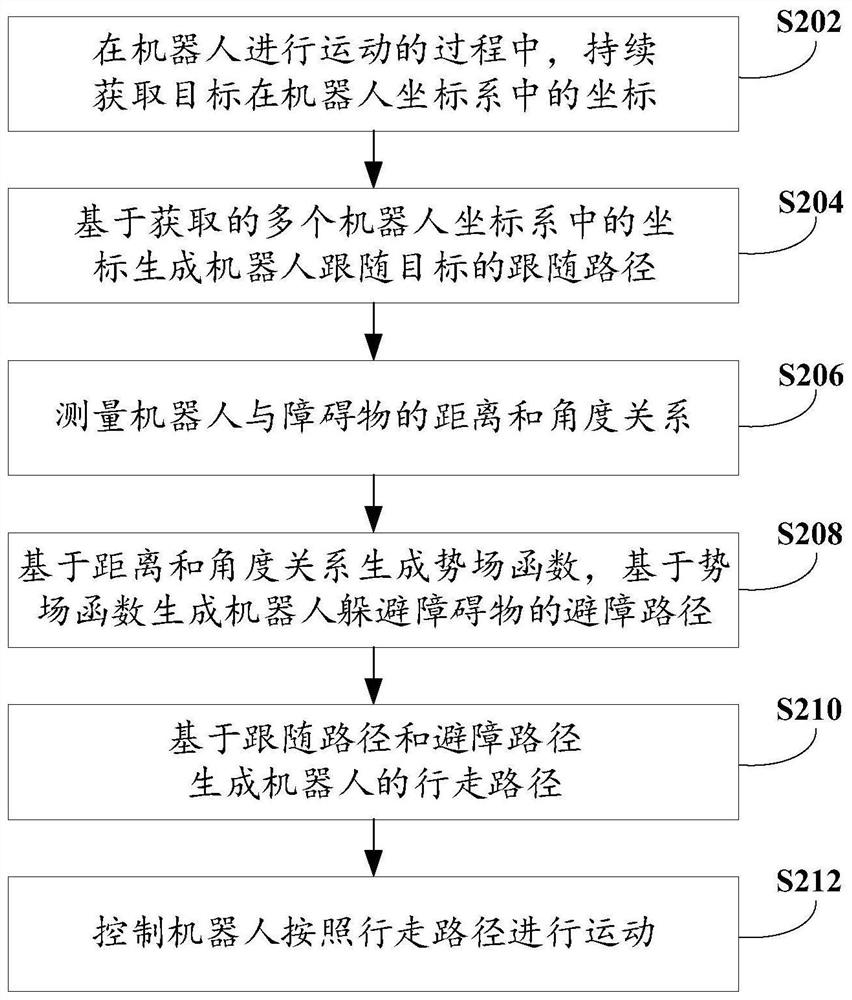
[0053] The embodiment provides another robot movement method, which is implemented on the basis of the above embodiments; this embodiment focuses on the specific implementation of generating a following path for the robot to follow the target. see figure 2 The flow chart of another robot motion method shown, the robot motion method in this embodiment includes the following steps:
[0054] Step S202, during the movement of the robot, continuously acquire the coordinates of the target in the robot coordinate system.
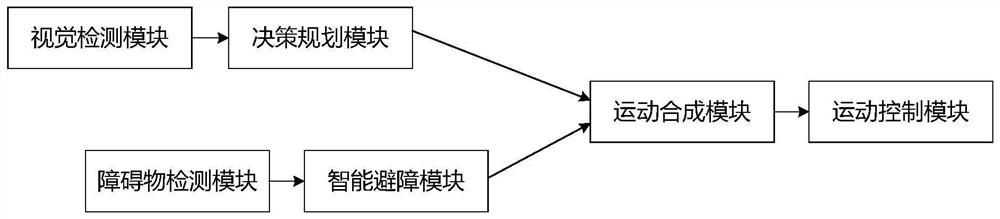
[0055] The solution provided in this embodiment can be used to realize the robot's visual following pedestrian function in an indoor environment, involving visual detection technology, path planning technology, motion control technology and intelligent obstacle avoidance technology. see image 3 A schematic diagram of a robot following and obstacle avoidance system shown, the robot follow and obstacle avoidance system of this embodiment may at least include the ...
example 1
[0099] Example 1: Head with no degree of freedom + omnidirectional drive structure.
[0100] see Image 6 A schematic diagram of a control principle is shown. The robot chassis and the head are fixed and cannot perform relative movement. The chassis is an omnidirectional drive structure, such as a 3-wheel omnidirectional wheel or a 4-wheel Mecanum wheel, and its movement adopts a mixed mode ——Following path and obstacle avoidance path superposition method. Module 1 visually detects pedestrian xyz, and module 21 converts xyz to coordinate XYZ in the robot coordinate system. Plane motion only considers XY. The module 22 output follows the path p1, which contains two degrees of freedom of XY. In terms of obstacle avoidance, module 3 detects obstacles ahead and calculates the shortest distance connection between the robot and obstacles in real time. Module 4 adopts 2D obstacle avoidance, and calculates the obstacle avoidance path p2 according to the obstacle avoidance potentia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More