Rehabilitation robot with electromyographic stimulation function and control method thereof
A control method and myoelectric technology, applied in the field of rehabilitation robots, can solve problems such as large individual differences in human body structure, inappropriateness, and poor rehabilitation effects, and achieve the goal of enriching muscle electrical stimulation modes, preventing muscle atrophy, and improving rehabilitation effects Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
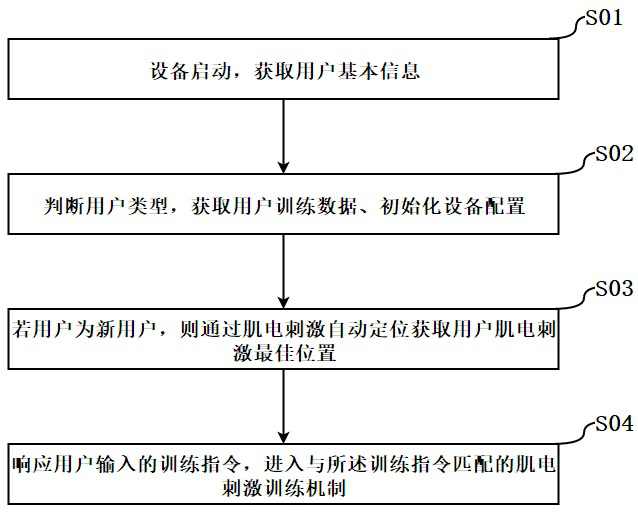
[0062] Such as Figure 1-7 As shown, the present invention provides a method for controlling myoelectric stimulation applied to rehabilitation equipment. The rehabilitation equipment at least includes an exoskeleton robot for the user to perform myoelectric stimulation rehabilitation training. The method includes the following steps:
[0063] S01. Start the device and obtain basic user information;
[0064] S02. Determine the user type, obtain user training data, and initialize device configuration;
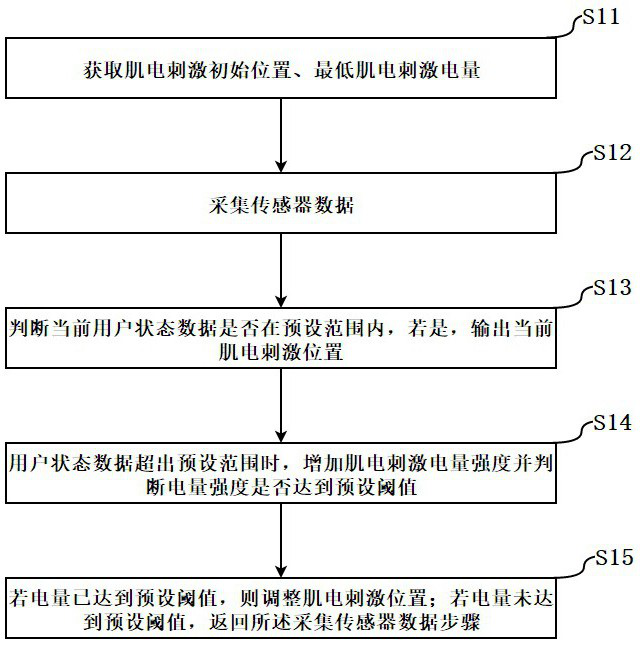
[0065] S03. If the user is a new user, obtain the best position of the user's myoelectric stimulation through the automatic positioning of the myoelectric stimulation;
[0066] S04. Responding to the training instruction input by the user, enter the muscle electrical stimulation training mechanism matching the training instruction.
[0067] Further, the basic user information includes but not limited to user ID, height, weight, age, arm length, leg length, etc.
[0068] Furthe...
Embodiment 2
[0111] A myoelectric stimulation control system applied to rehabilitation equipment, such as Figure 7 As shown, it includes a main control module, a drive module, a data transmission module, a myoelectric stimulation control module, an electrode sheet group and a sensor; the main control module is used to obtain / execute user operation instructions, judge instructions, execute training modes, and signal Processing, drive control; the drive module is used to drive the rehabilitation equipment to output resistance load; the data transmission module is used to download / upload user basic information and user training data between the rehabilitation equipment and the cloud; the myoelectric stimulation control The module is used to control the electrode sheet to output myoelectric stimulation electric signals.
[0112] Further, the sensors include but are not limited to angle sensors, pressure sensors, torque sensors, attitude sensors, and myoelectric sensors.
[0113] As an exampl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com