Ultra-large space telescope on-orbit assembly method based on multi-space robot system
A robot system and space robot technology, applied in the field of on-orbit assembly of very large space telescopes, can solve the problems of insufficient rocket carrying capacity, inability to meet the construction and follow-up maintenance of large space telescopes, and the difficulty of maintaining large space equipment, etc., to achieve enhanced The effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
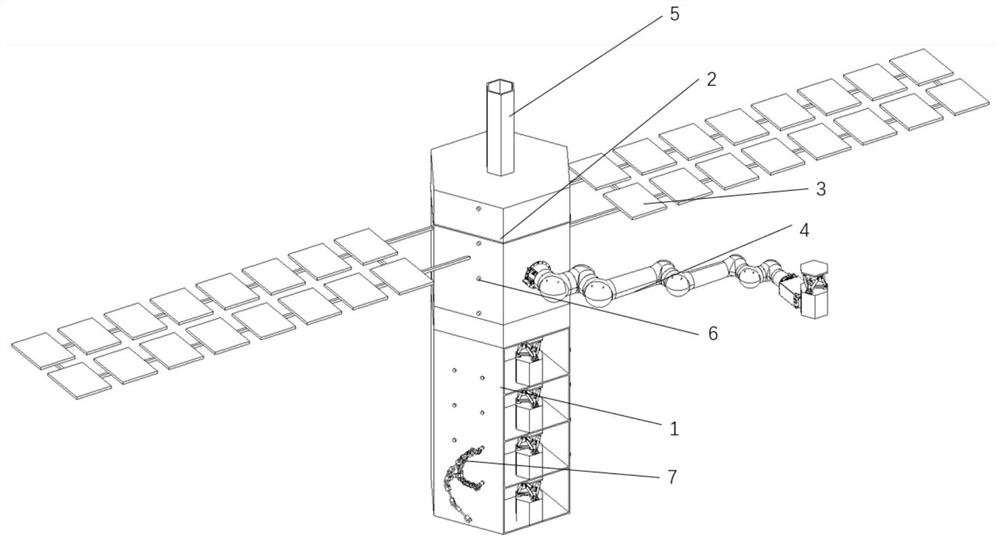
[0020] Specific implementation mode one: refer to Figure 1 to Figure 5 Describe this embodiment, this embodiment provides a kind of very large space telescope assembly method based on multi-space robot system on orbit, described method is realized through the following steps:
[0021] S1. Split the space telescope into: primary mirror, secondary mirror and light blocking part, and send the primary mirror and super large space telescope assembly system into the predetermined orbit through the carrier rocket;
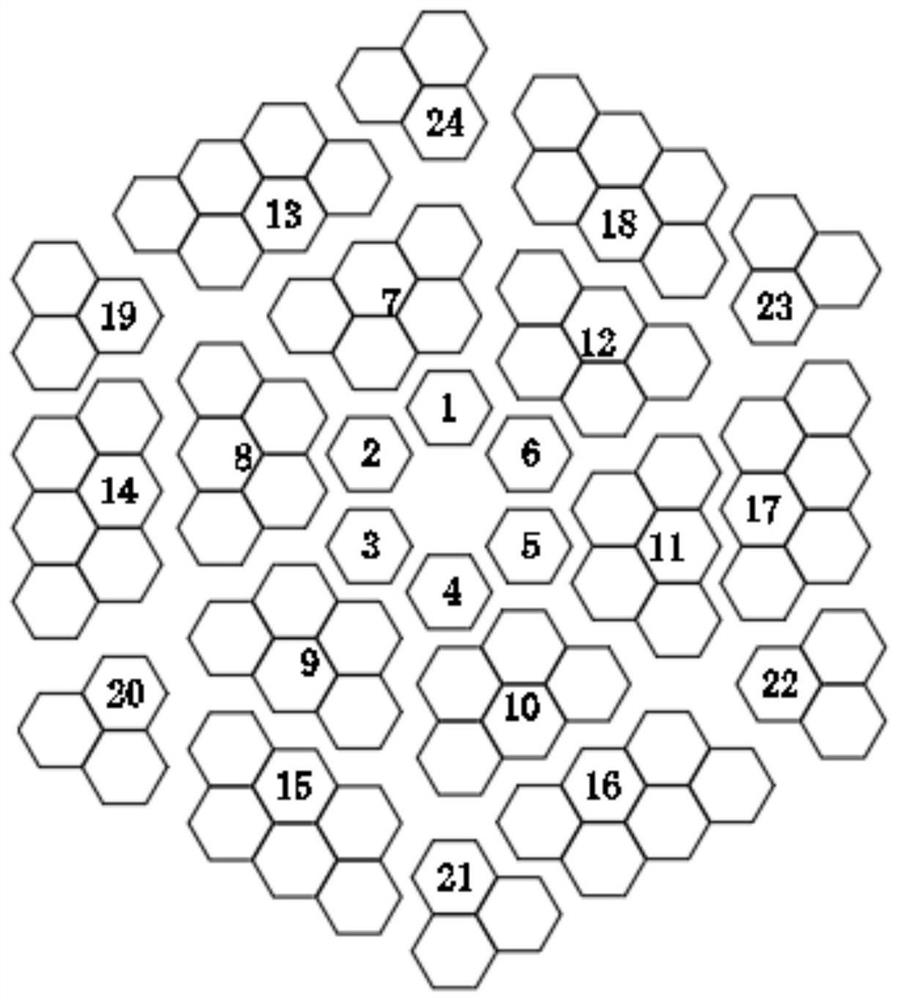
[0022] Specifically: the main mirror part is spliced by the modular sub-mirror 8 around the three-mirror module 5, the secondary mirror part is composed of the secondary mirror bracket 9 and the secondary mirror module 10, and the light blocking part is spliced by the hood 11. The cargo compartment 1 of the modular sub-mirror 8, the rotatable spacecraft platform 2, the three-mirror module 5, the seven-degree-of-freedom space manipulator 4, the solar wing flap 3 and t...
specific Embodiment approach 2
[0036] Specific implementation mode two, refer to Figure 1 to Figure 5 Describe this implementation mode, this implementation mode is to further limit the step 1 described in the specific implementation mode 1, in this implementation mode,
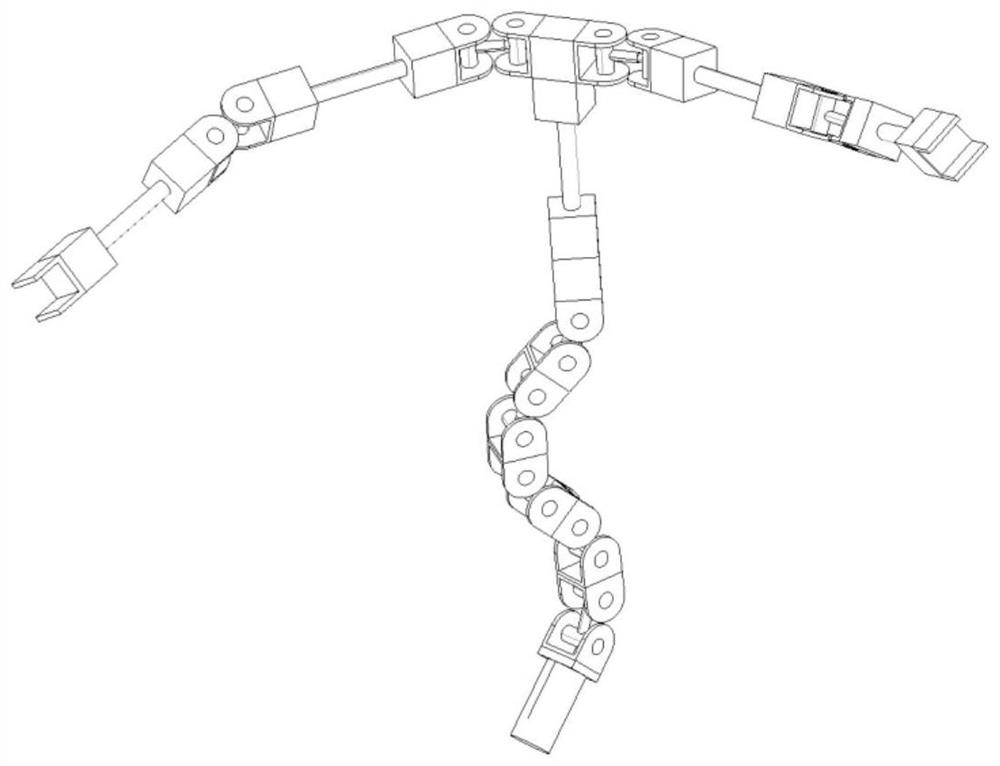
[0037] In this embodiment, the very large space telescope assembly system includes a cargo bin 1, a rotatable spacecraft platform 2, two solar wing flaps 3, a seven-degree-of-freedom space manipulator 4, a three-mirror module 5, an adapter 6 and Reproducible multi-branch super-redundant space robot 7, the cargo warehouse-1 is located at the lowermost end, and the rotatable spacecraft platform 2 is located on the cargo warehouse-1. The rotatable spacecraft platform 2 is mainly divided into two parts, and The fixed part of the freight compartment 1 is the fixed part, and the other part is the rotatable part, which has the ability to rotate relative to the fixed part. On the part, the seven-degree-of-freedom space manipulator 4 is located o...
specific Embodiment approach 3
[0038] Specific implementation mode three, refer to Figure 1 to Figure 5 Describe this embodiment. This embodiment is to further limit the seven-degree-of-freedom spatial manipulator 4 of the second specific embodiment. In this embodiment, the seven-degree-of-freedom spatial manipulator 4 is the SSRMS shoulder-elbow-wrist offset type The robotic arm has seven rotating joints and is a fixed-base robotic arm with a fixed working space. The main mirror of a large-aperture space telescope has a large diameter, and the assembly range varies greatly. A single fixed-base seven-degree-of-freedom space robotic arm 4 cannot complete For the assembly task of the large-aperture space telescope, a regenerative multi-branch super-redundant space robot 7 and a seven-degree-of-freedom space manipulator 4 are used to form a multi-space robot system, which cooperates with the rotatable spacecraft platform 2 . Other composition and connection modes are the same as the second embodiment;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com