

Two-section wheel foot type pipeline climbing robot
A robot and legged technology, applied in the field of robotics, can solve problems such as unsteady movement, pipeline accidents, and impact pipeline detection, etc., and achieve the effect of improving the ability to climb over obstacles with variable diameters, strong obstacle surmounting ability, and wide adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
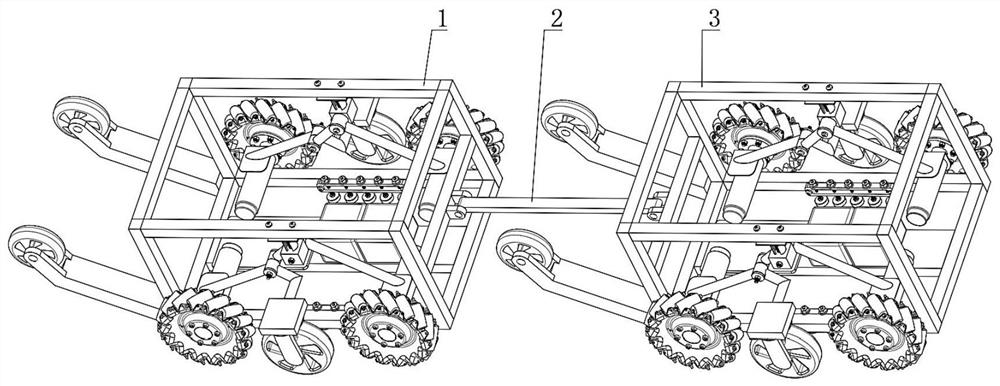
[0073] A two-section wheel-footed pipe climbing robot. The two-section wheel-footed pipeline climbing robot is such as figure 1 As shown, it consists of a front climbing robot 1 , a robot connector 2 and a rear climbing robot 3 , and the rear end of the front climbing robot 1 is connected with the front end of the rear climbing robot 3 through the robot connector 2 .
[0074] For the convenience of description, the front climbing robot 1 is set as the front, and the left side facing the front of the two-section wheel-footed pipe climbing robot is the left side.
[0075] For the convenience of description, the following letters are described as follows:
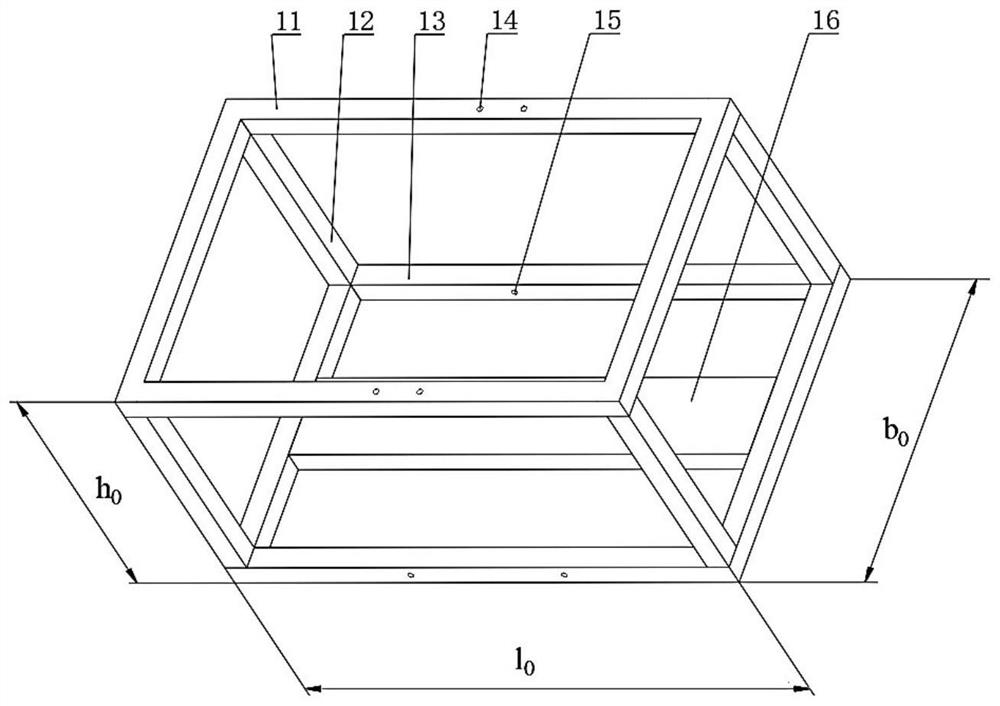
[0076] l 0 Indicates the length of the climbing link 6, mm;
[0077] b 0 Indicates the width of the climbing link 6, mm;
[0078] h 0 Indicates the height of the climbing link 6, mm.
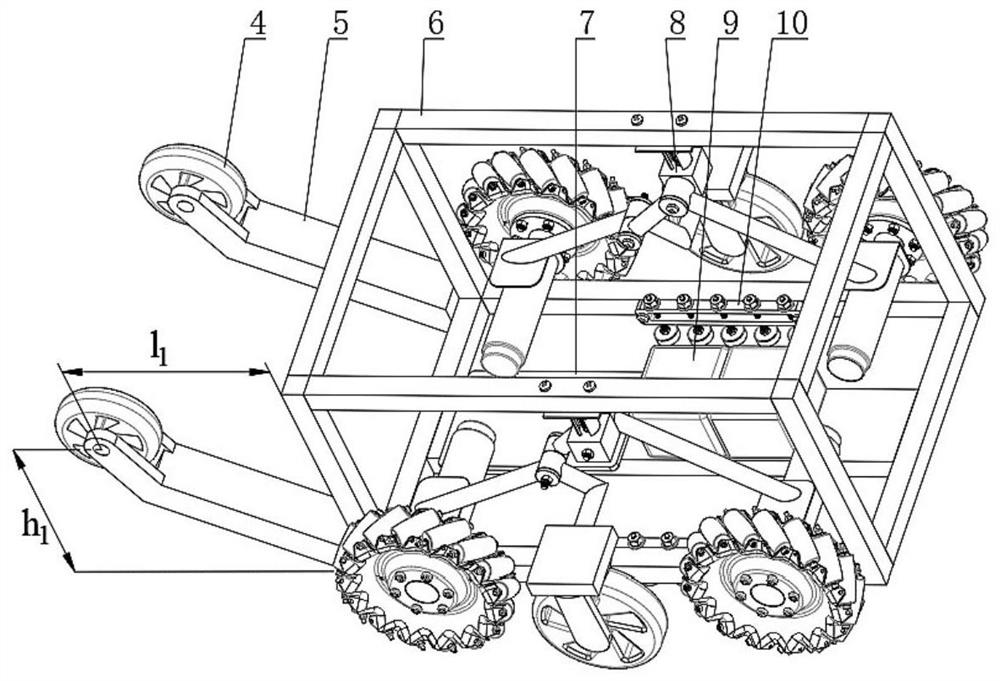
[0079] like figure 2 As shown, the front climbing robot 1 includes 2 auxiliary wheels 4, 2 auxiliary brackets 5, a climbing connection...
Embodiment 2
[0112] A two-section wheel-footed pipe climbing robot. Except the following technical parameters, all the other are the same as in Example 1:
[0113] The horizontal distance l between the axis of the auxiliary wheel 4 and the front end of the climbing link 6 1 =0.4l 0 ;
[0114] The vertical distance h between the axis of the auxiliary wheel 4 and the lower plane of the climbing frame 6 1 =0.7h 0 .
[0115] The vertical distance h between the center of the horizontal plate of the front motor bracket 25 and the axis of the previous bushing 27 2 =0.22h 0 ;
[0116] The horizontal distance l between the center of the horizontal plate of the front motor bracket 25 and the axis of the previous bushing 27 2 =0.26l 0 ;
[0117] The horizontal distance b between the center of the horizontal plate of the front motor bracket 25 and the right side of the vertical plate of the front motor bracket 25 1 =0.06b 0 ;
[0118] Horizontal distance b between the center of the right ...
Embodiment 3
[0126] A two-section wheel-footed pipe climbing robot. Except the following technical parameters, all the other are the same as in Example 1:
[0127] The horizontal distance l between the axis of the auxiliary wheel 4 and the front end of the climbing link 6 1 =0.45l 0 ;
[0128] The vertical distance h between the axis of the auxiliary wheel 4 and the lower plane of the climbing frame 6 1 =0.75h 0 .
[0129] The vertical distance h between the center of the horizontal plate of the front motor bracket 25 and the axis of the previous bushing 27 2 =0.225h 0 ;
[0130] The horizontal distance l between the center of the horizontal plate of the front motor bracket 25 and the axis of the previous bushing 27 2 =0.265l 0 ;
[0131] The horizontal distance b between the center of the horizontal plate of the front motor bracket 25 and the right side of the vertical plate of the front motor bracket 25 1 =0.065b 0 ;
[0132] Horizontal distance b between the center of the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More