

Laser mapping method and device based on hierarchical switchable sparse pose map optimization
A map optimization and pose technology, which is applied in the field of laser mapping methods and devices, can solve the problems of inability to align and match radar data and maps, and discrete, and achieve the effects of improved efficiency, clear mapping effect, and improved accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
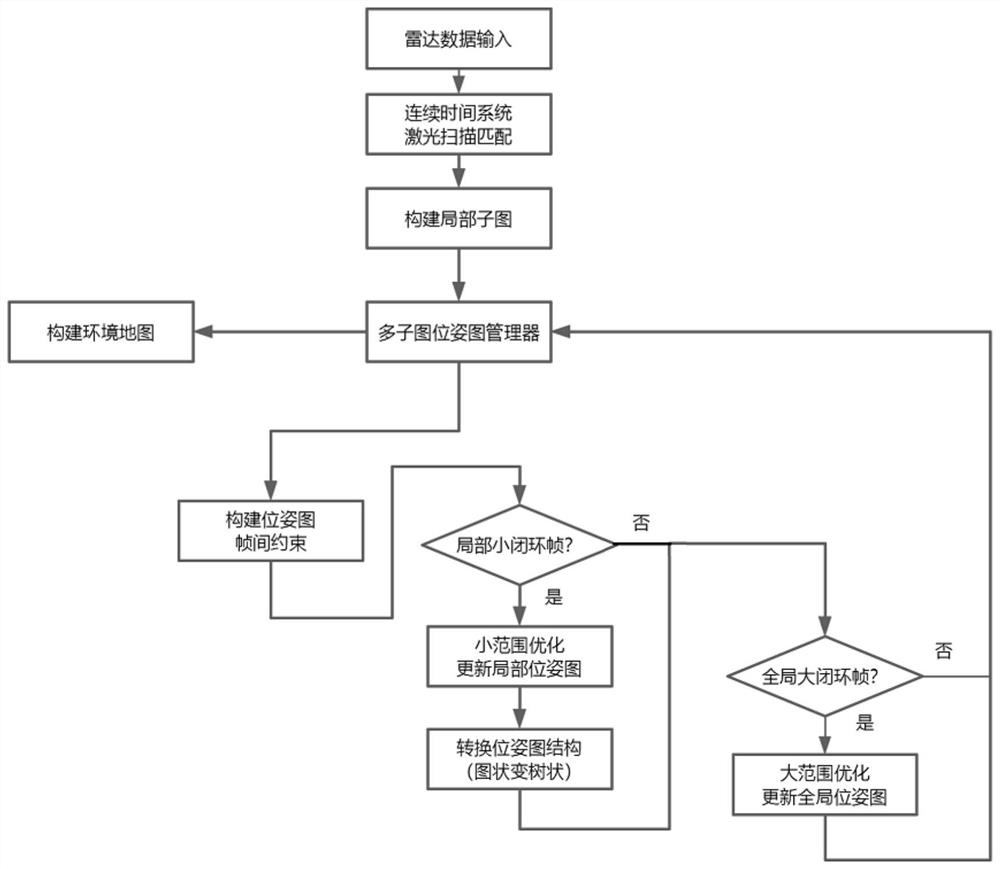
[0045] like figure 1 As shown, the present invention discloses a laser mapping method and device based on hierarchical switchable sparse pose graph optimization, which can be applied to scenarios where 2D planar laser radar is used for mapping, such as the specific application of autonomous navigation robots, Logistics distribution robots, disinfection robots, shopping guide robots, and welcome robots, etc., through the hierarchical pose graph optimization method, update the pose graph through partial optimization, and effectively eliminate the accumulation of errors in a timely and effective manner; through switchable motion constraints, improve the system performance Anti-interference performance. At the same time, by constructing a continuous-time system motion model, estimating the value of the robot's pose over time, making the mapping ef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More