

Sea-air collaborative visual tracking and autonomous recovery method for unmanned ship-mounted unmanned aerial vehicle
A visual tracking and unmanned aerial vehicle (UAV) technology, which is applied to collaborative devices, computer parts, and image data processing. The effect of improving accuracy and robustness, improving robustness, and fast computing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
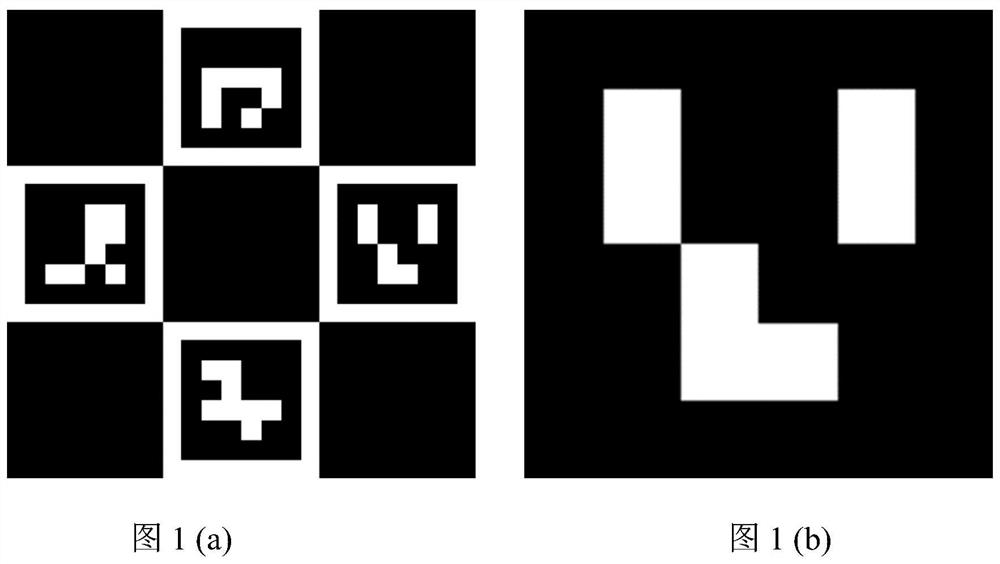
[0028] The method disclosed in the present invention combines the target detection method of deep learning with the improved K-CFTLD target tracking algorithm to dynamically track the unmanned boat, and uses the correction module to prevent the wrong tracking of the moving unmanned boat ;Design the visual navigation method of sea-air coordination. By installing cameras on both the UAV and the unmanned boat, the identification code is visually recognized and matched with the anti-occlusion target tracking algorithm, aiming to make up for the traditional vision-based navigation UAV landing system. lack of.
[0029] Such as figure 1As shown, firstly, an identification code based on binary codi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More