

Distance measuring method based on monocular camera and laser radar
A monocular camera and lidar technology, which is used in distance measurement, image enhancement, image analysis, etc., can solve the problem of low ranging accuracy, and achieve the effect of reducing the amount of calculation, reliable results, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
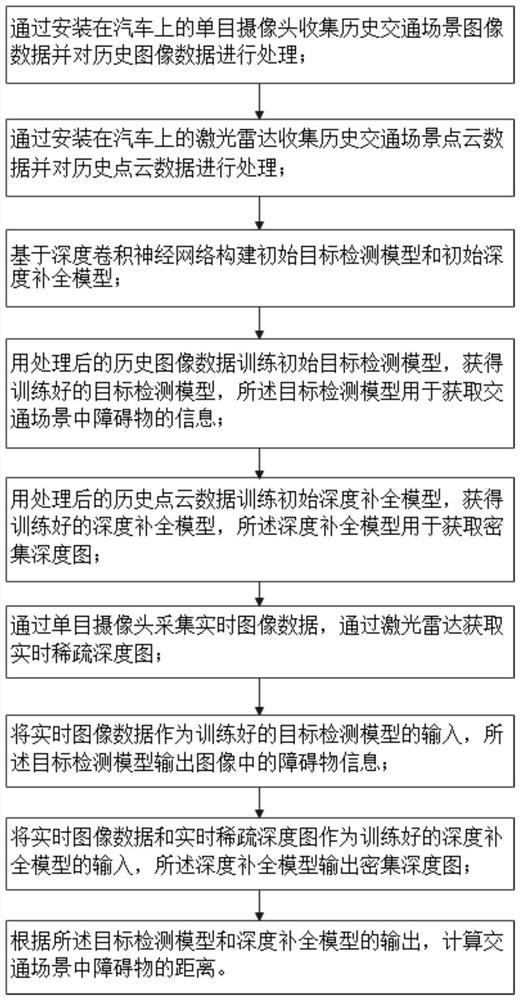
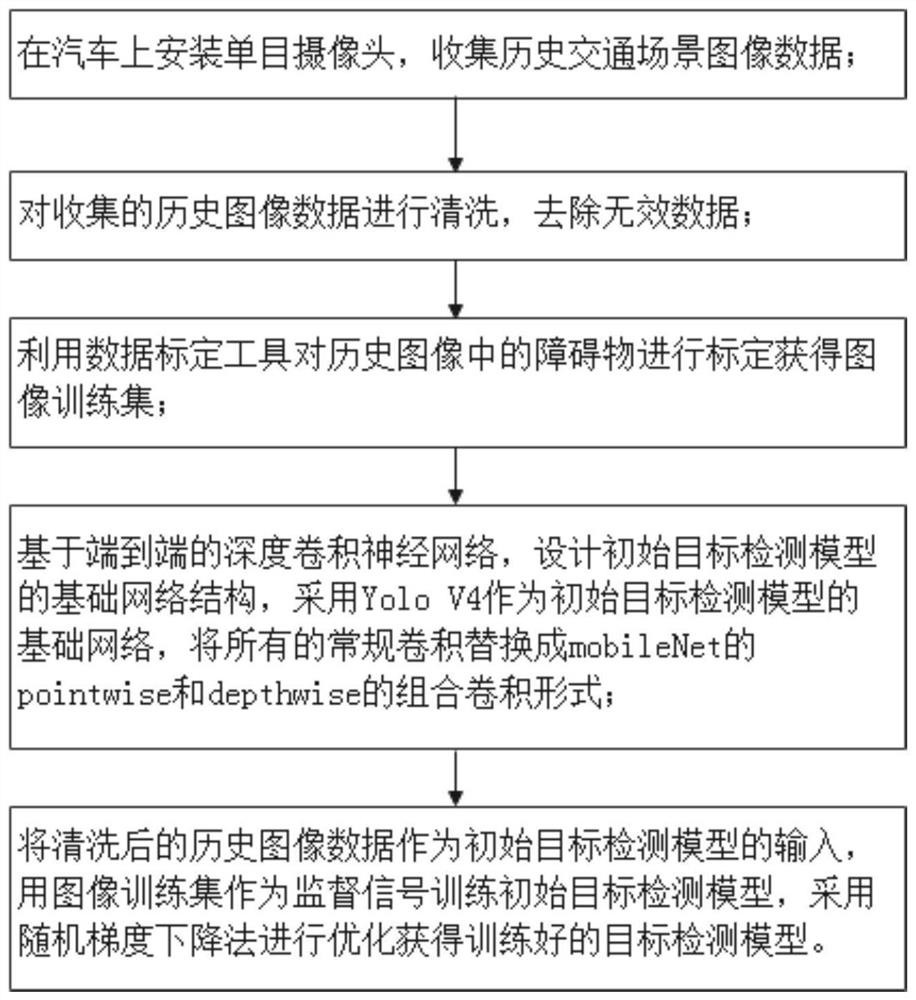
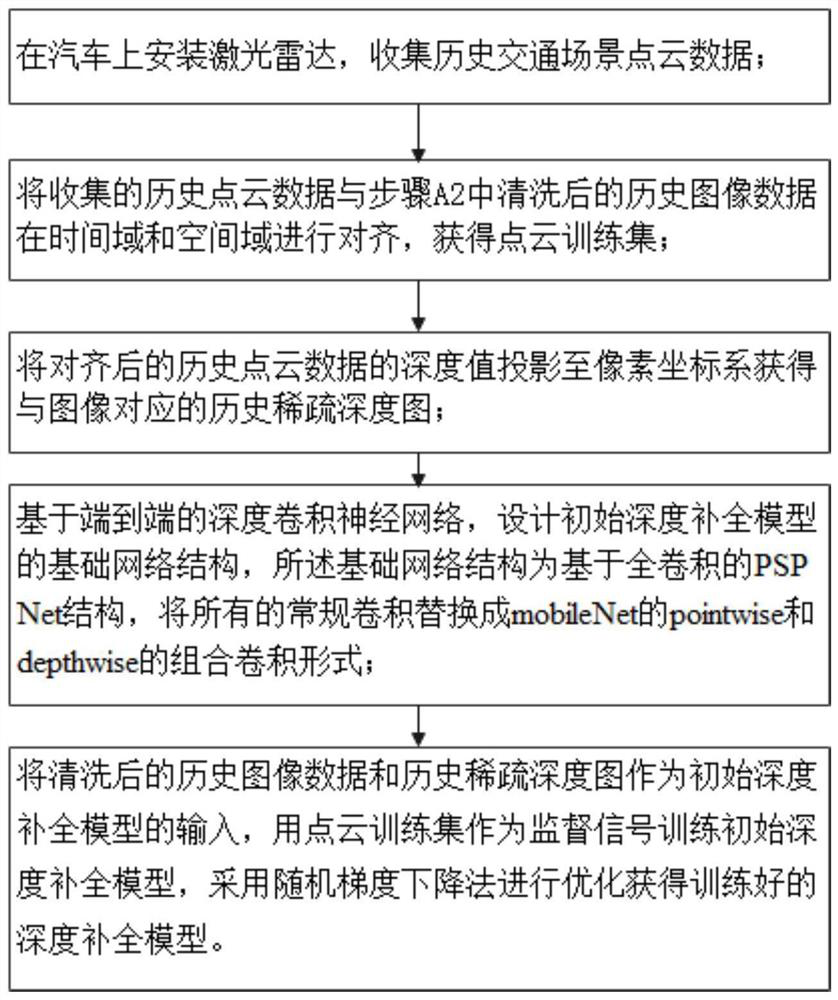
[0026] Such as figure 1 Shown, a kind of ranging method based on monocular camera and lidar comprises the following steps: Step S1) collects historical traffic scene image data by the monocular camera installed on the car and processes historical image data; Step S2) Collect historical traffic scene point cloud data through the lidar installed on the car and process the historical point cloud data; step S3) build an initial target detection model and an initial depth completion model based on a deep convolutional neural network; step S4) use the processing The final historical image data trains the initial target detection model to obtain the trained target detection model, and the target detection model is used to obtain the information of obstacles in the traffic scene; step S5) trains the initial depth completion model with the processed his...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More