

Cooperative control method and system for chassis movement and target strike of ground unmanned vehicle
An unmanned vehicle, collaborative control technology, applied in neural learning methods, character and pattern recognition, special data processing applications, etc. The fire rescue capability of fire trucks and other issues can shorten the completion time, improve the execution effect, and achieve good universality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
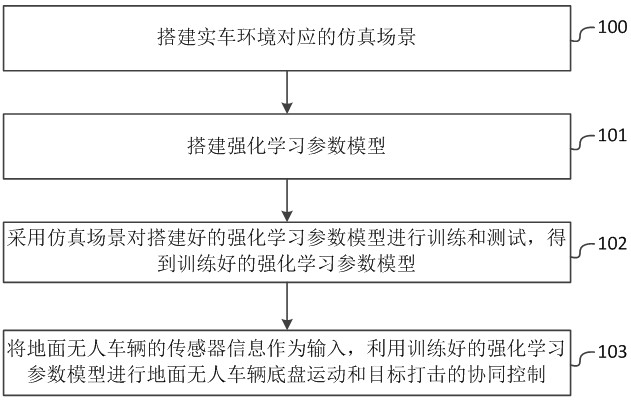
[0059] The purpose of the present invention is to provide a ground unmanned vehicle chassis movement and target strike cooperative control method and system, which can improve the coordination performance between the maneuvering module and the mission module, and then solve the problem of low combat efficiency and weak self-protection of the current ground unmanned vehicle And other issues.
[0060] In order to make the above objects, features and advantages o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More