Three-degree-of-freedom full-decoupling parallel mechanical leg configuration and quadruped robot
A technology of mechanical legs and degrees of freedom, applied in the field of robotics, can solve the problems of large robot structure size, heavy mechanical leg weight, and large inertial impact, and achieve the effect of simple structure, large carrying capacity, and good dynamic response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
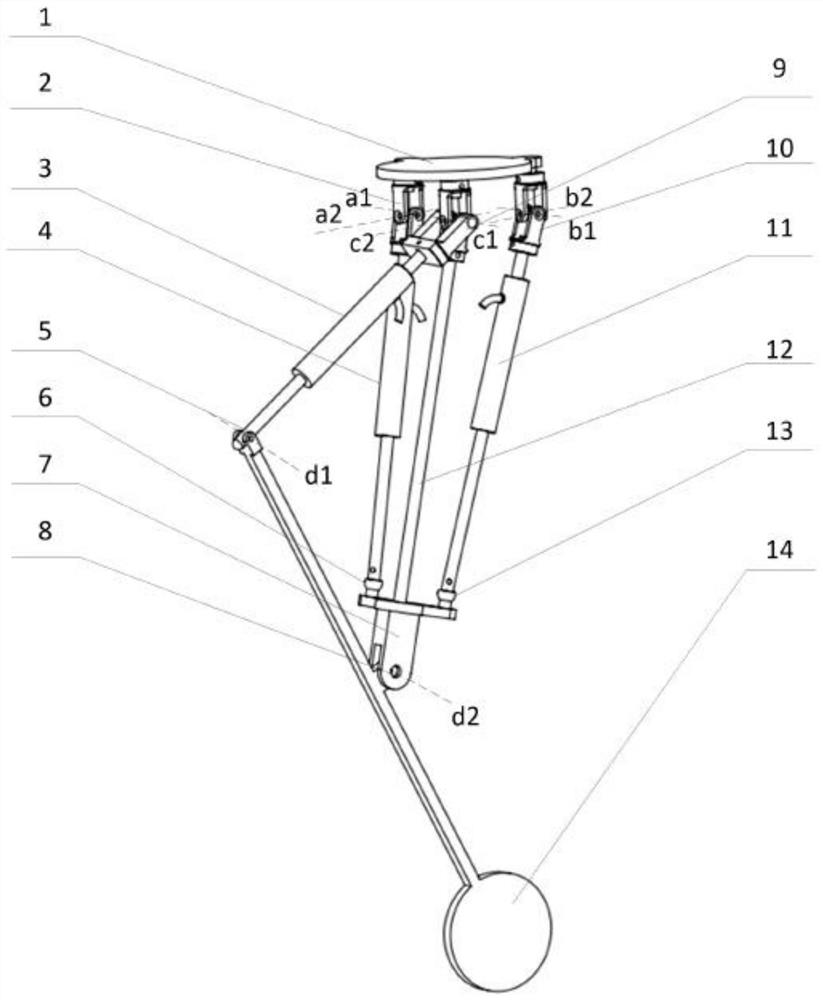
[0032] This embodiment provides a three-degree-of-freedom fully decoupled parallel mechanical leg configuration, such as figure 1 As shown, it includes a fixed platform 1, a first universal joint 2, a third linear drive part 3, a first linear drive part 4, a third hinge 5, a first ball joint 6, a moving platform 7, a hinge 8, and equivalent Hip joint 9, second universal joint 10, second linear drive part 11, support rod 12, second ball joint 13, lower leg actuator 14;
[0033] Wherein, the equivalent hip joint 9 is arranged on one side of the fixed platform 1, and its first end is fixed with the fixed platform 1; the third linear drive part 3 is fixed at one end with the second end of the equivalent hip joint 9; An actuator 14, one end of which is hinged to the other end of the third linear drive part 3; a support rod 12, one end of which is fixed to the third end of the equivalent hip joint 9; the moving platform 7 is arranged on the lower side of the fixed platform 1, one of...
Embodiment 2
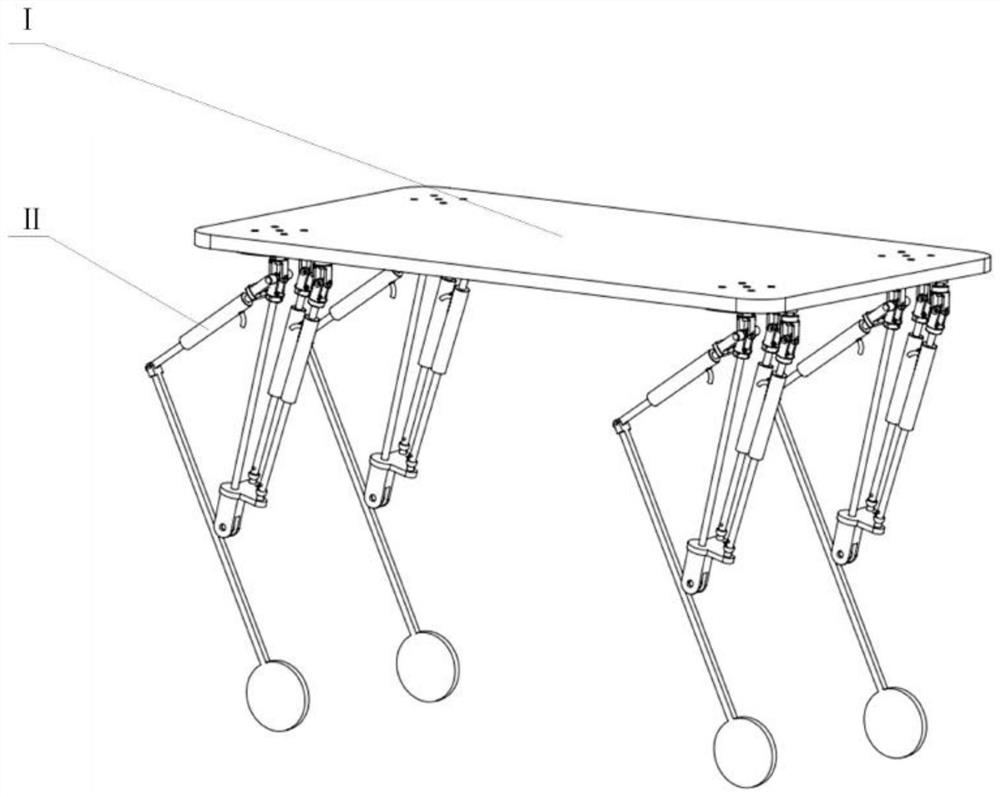
[0043] This embodiment provides a robot, specifically a quadruped robot, such as image 3 As shown, it includes the fuselage I and the four above-mentioned three-degree-of-freedom fully decoupled parallel mechanical legs leg configuration II arranged on the fuselage, and the four three-degree-of-freedom fully decoupled parallel mechanical legs leg configuration II The fixed platform 1 is connected by bolts and is divided into two groups of front and rear array arrangements or symmetrical arrangements under the fuselage 1.
[0044] The robot provided in this embodiment, by driving the three-degree-of-freedom fully decoupled parallel mechanical leg leg configuration II, the lower leg actuator can move cooperatively under the drive to realize various walking trajectories, and drive four three-freedom fully decoupled parallel mechanical Leg configuration II, through the coordinated movement of four parallel mechanical legs, the three-dimensional space movement of the quadruped rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com