

Amphibious three-mode flying adsorption wall-climbing robot and control method
A wall-climbing robot and robot technology, which is applied in the direction of vehicles, motor vehicles, transportation and packaging that can be converted into airplanes, can solve the problems of poor adaptability to the wall environment, no effective extension of the running time of the wall, and prolonging the battery life of the robot. , to achieve the effect of long wall movement time, strong adaptability and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
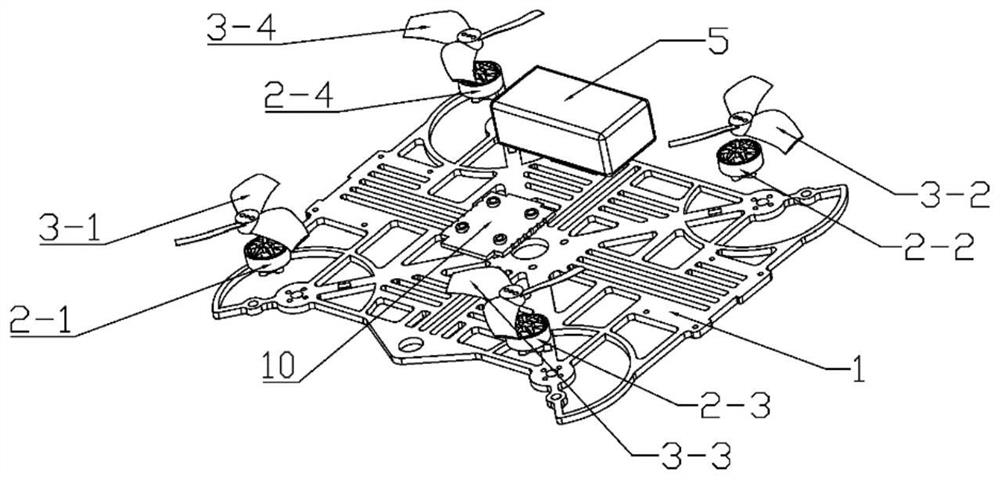
[0079] refer to image 3 , in the flight system of the present invention, the four-rotor frame is an X-shaped configuration, and the bottom plate of the frame can be made of an epoxy resin-based carbon fiber composite laminate, and the four brushless motors are respectively installed on the corresponding parts of the frame bottom plate by screws position, the corresponding propeller is fixed on the rotor of the brushless motor by screws, the power cord of the brushless motor is welded on the brushless electronic governor through the corresponding hole on the bottom plate of the frame, and the brushless electronic governor is glued The positive and negative input power lines are connected to the power battery through the weight-reducing hole of the frame bottom plate, and the power battery is placed on the front of the frame bottom plate and fixed by rolling strips.
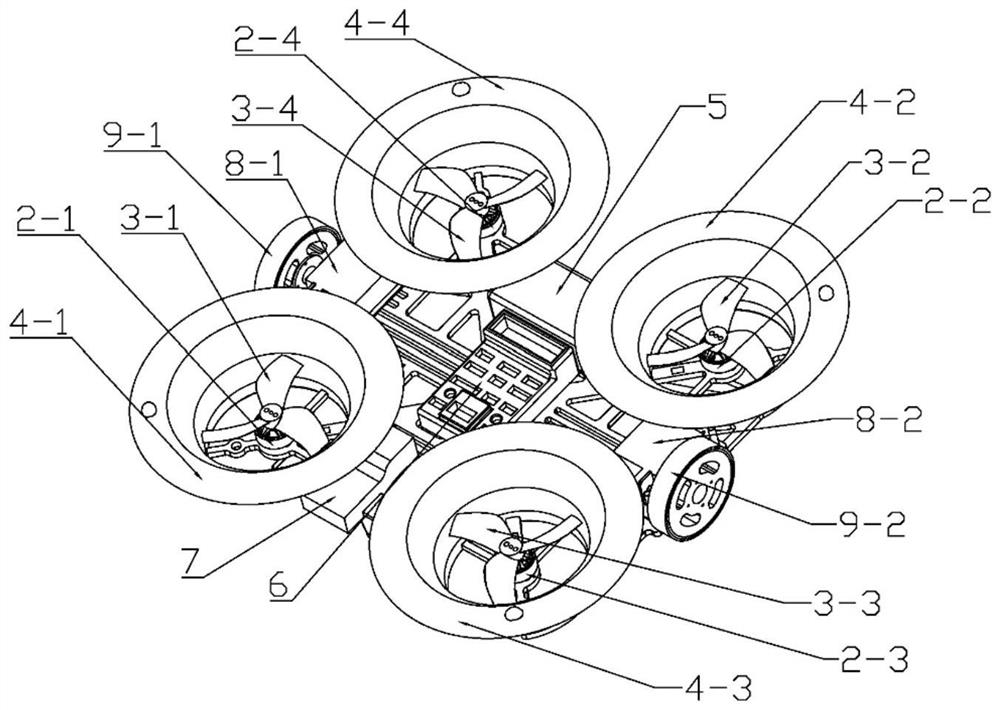
[0080] refer to Figure 4 , in the wall adsorption system of the present invention, the slots reserved by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More