

Cooperative interaction control architecture between domain controllers and control method thereof
A domain controller and interactive control technology, applied in control devices and other directions, can solve the problems of high development cost of new electronic control functions, high dependence on imports of components, and difficult control of manufacturing costs, so as to reduce network communication delay and packet loss. Probability, improve safety and comfort, improve the effect of voice
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Embodiments of the present application are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary, and are intended to explain the present application, and should not be construed as limiting the present application.
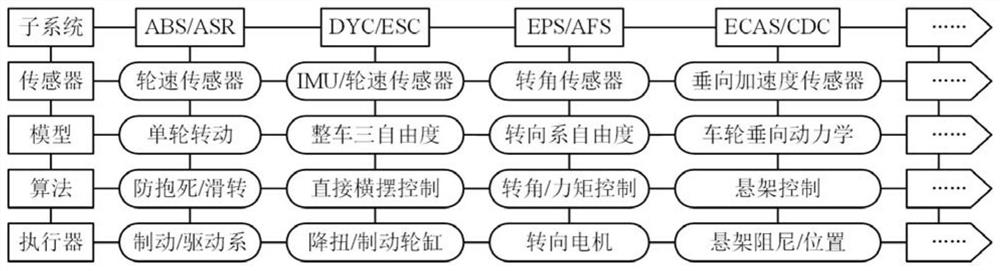
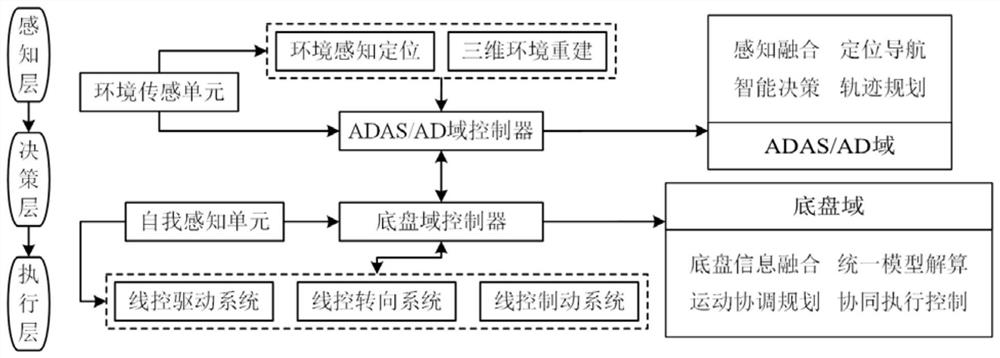
[0038] Divided by functional domain, the EEA of ICV is mainly divided into powertrain domain, chassis domain, ADAS / AD domain (Advanced Driver Assistance Systems, Advanced Driver Assistance Systems; automatic driving, Automated Driving), body domain, and infotainment domain. Among them, the first three belong to the most core functional domains, which are directly related to ICV's intelligent network connection system, drive braking system and active and passive safety system. In fact, the ADAS / AD domain controller and the ch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More