

Parallel multi-axis robot and container stacking robot provided with same
A multi-axis robot and palletizing robot technology, applied in the field of mobile palletizing robots, can solve problems such as inflexible operation, large space occupation of special planes, and limited application scenarios, so as to ensure stability and accuracy and improve flexibility , the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Order that the invention object, technical solutions, and advantages of the embodiments more clearly, the following embodiments of the invention, the technical solutions in the embodiments will be apparent to the present invention, completely described, obviously, the described embodiments are part of this invention Example embodiments rather than all the embodiments. Based on the embodiments in the present invention, all other embodiments obtained without creative labor are not made in the premise of creative labor.
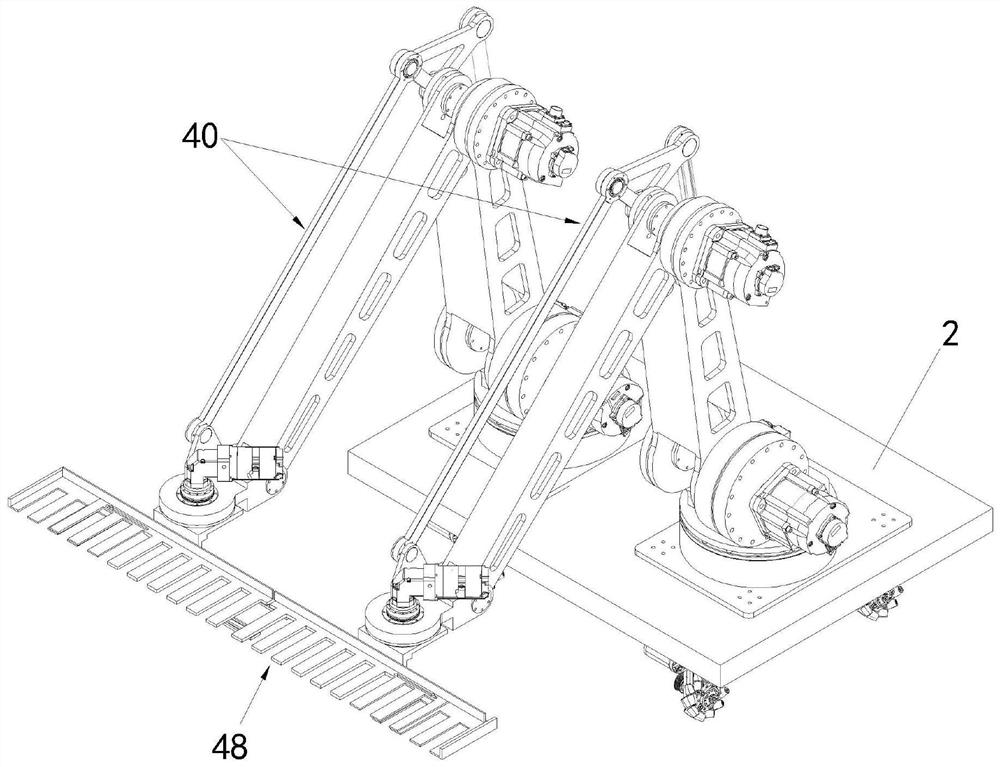
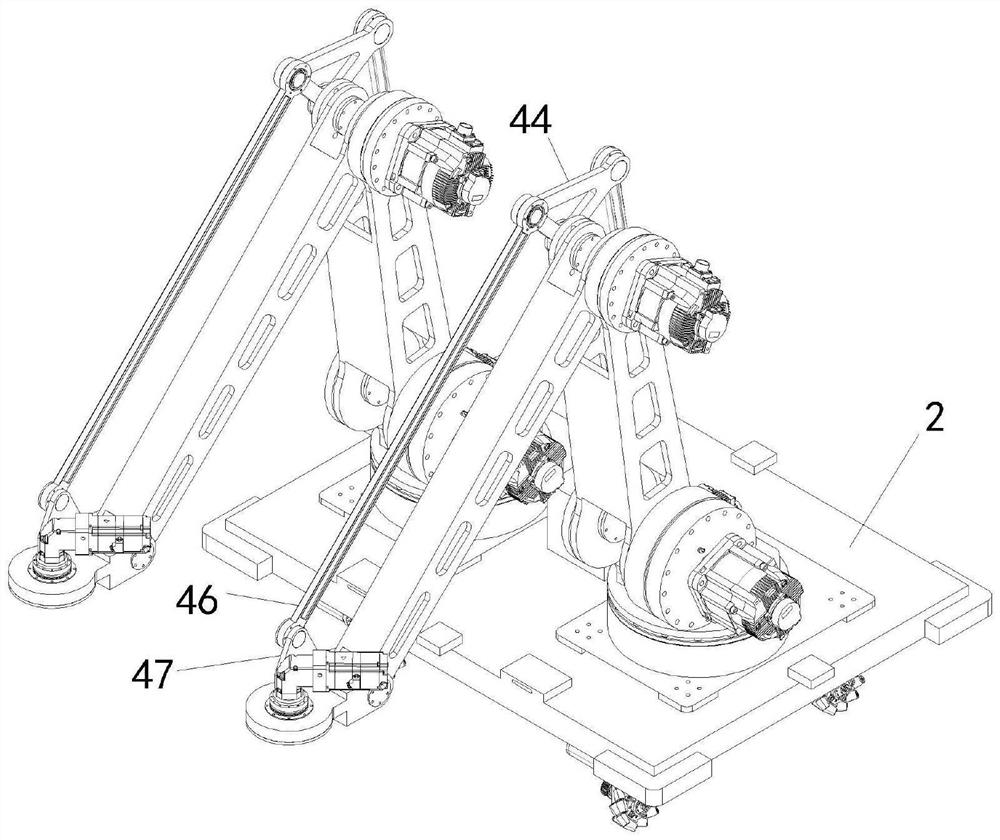
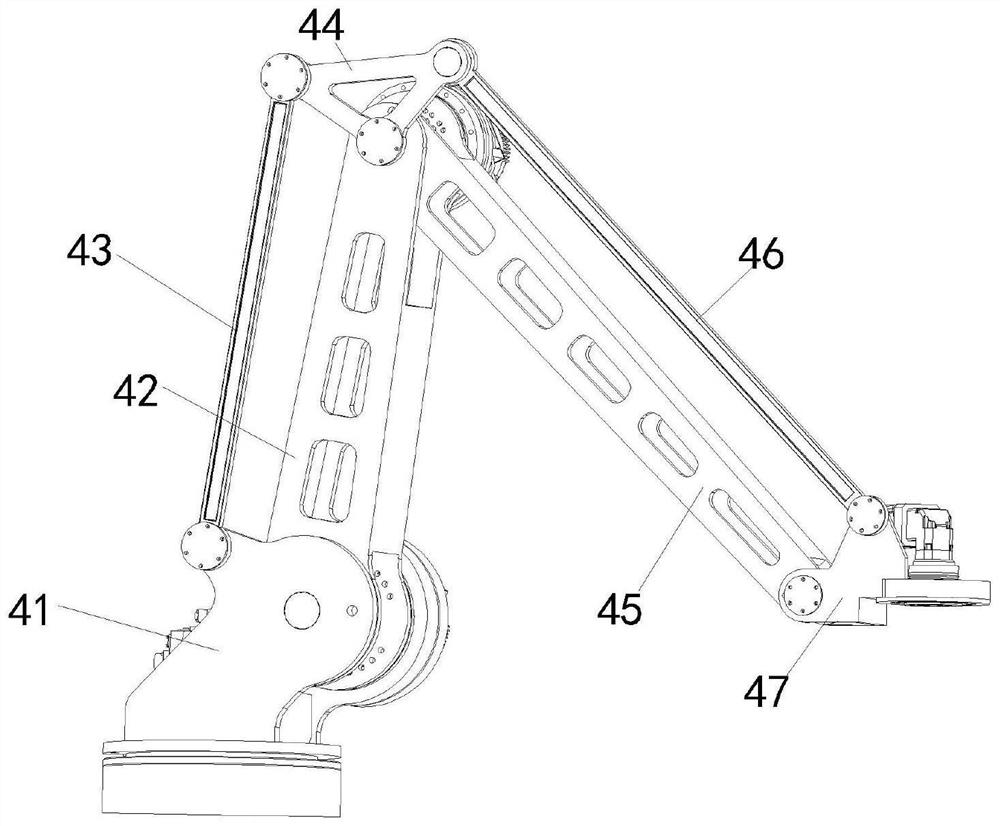
[0051] Please refer to Figure 1 to 6 , Structure is provided parallel axis robot according to the present embodiment is as follows:
[0052] Two identical four-axis robot structure of the robot base 40 respectively mounted on the upper end of the support base plate 2, mounted on the support plate 2 in a position symmetrical arrangement of a pair of four-axis robot by the support base 40 provides support for the plate 2;
[0053] Four-axis robot 40 of the oute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More