Industrial robot capable of adjusting grabbing force and using method of industrial robot
An industrial robot and adjustable technology, applied in the field of robots, can solve the problems of falling clamping force, large device, damage, etc., and achieve the effect of increasing friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
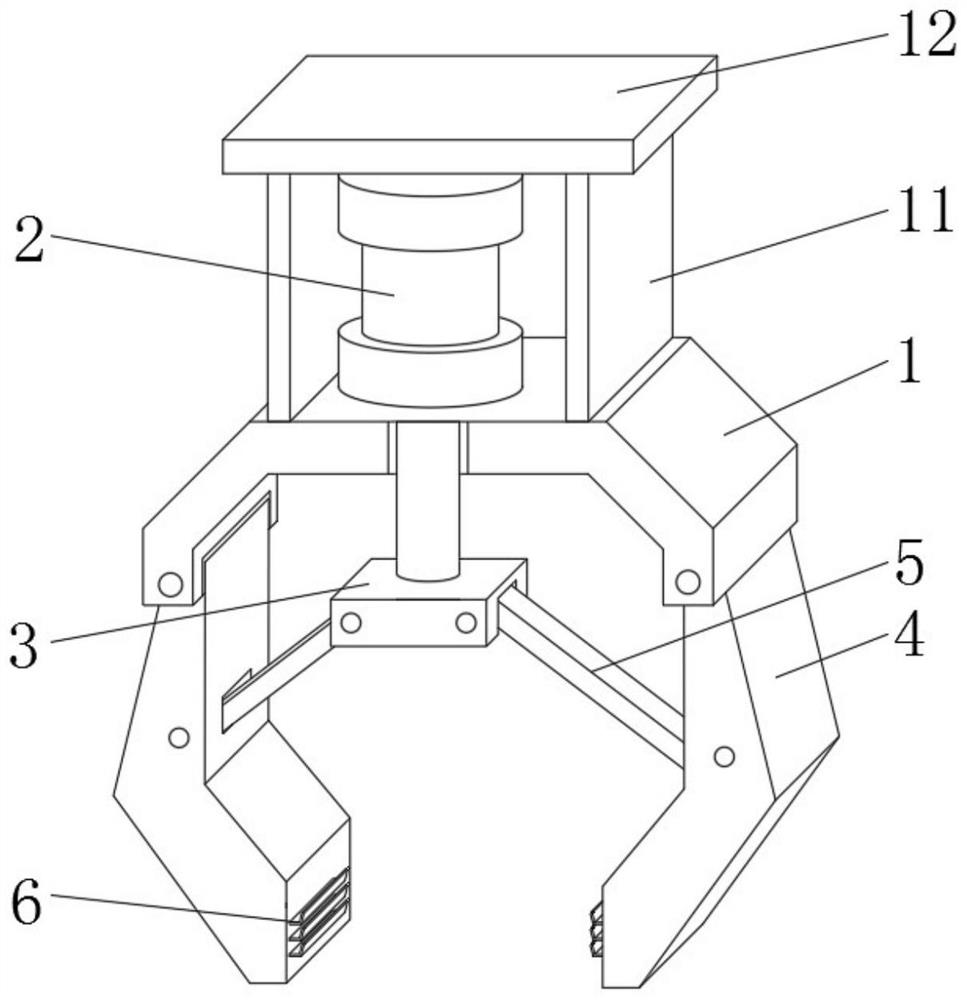
[0033] see Figure 1-2 , this embodiment provides an industrial robot with adjustable grasping strength, including a mounting base 1 and a cylinder 2 fixedly installed on the mounting base 1, and the two ends of the mounting base 1 are respectively provided with mounting grooves with the notches facing downwards. In the installation grooves at both ends of the mounting base 1, the clamping jaws 4 are rotated by rotating the pin shaft, so that the clamping jaws 4 can rotate around the two ends of the mounting base 1, and the output end of the cylinder 2 runs through the mounting base 1 and is fixedly connected with the connecting plate 3 , both ends of the connecting plate 3 are rotatably installed with a strut 5, and the end of the strut 5 is rotatably connected to the jaw 4, and the upper side of the mounting seat 1 is respectively fixedly connected with a vertical plate 11 on both sides of the cylinder 2, two The upper end of riser 11 is jointly fixedly connected with instal...
Embodiment 2
[0039] refer to Figure 3-4 , the difference from Example 1 is:
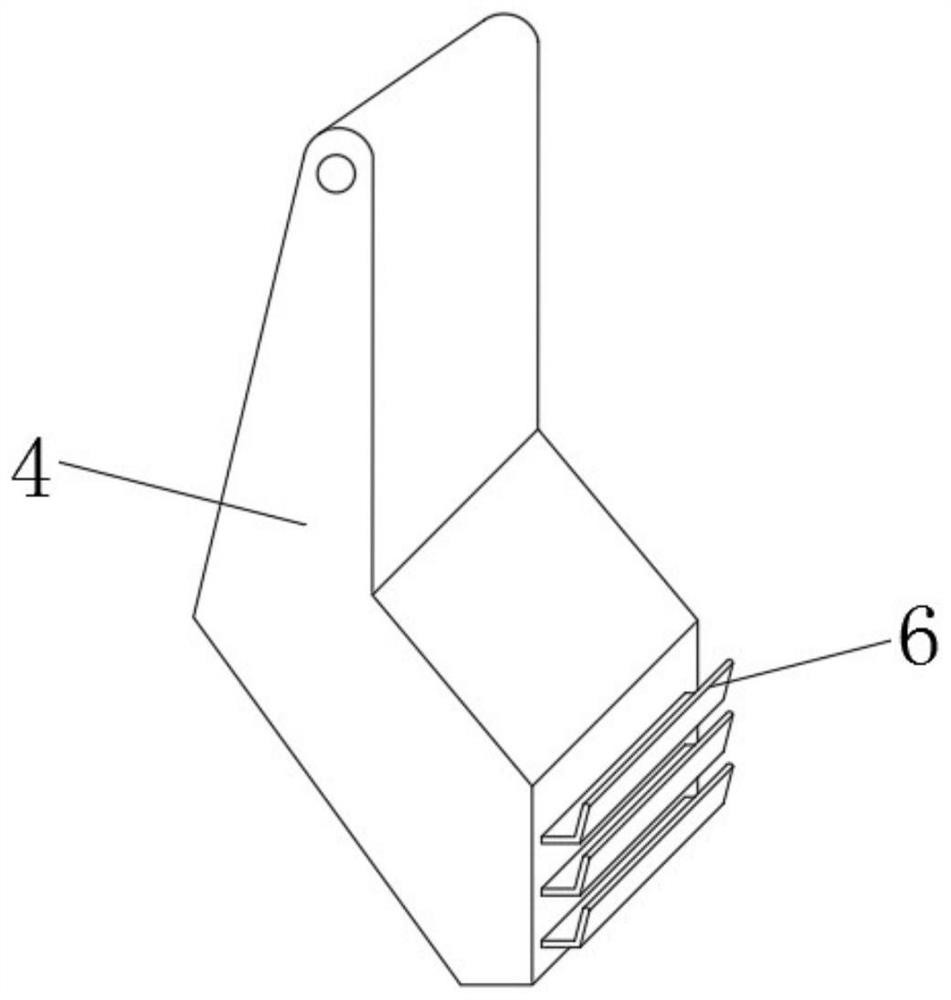
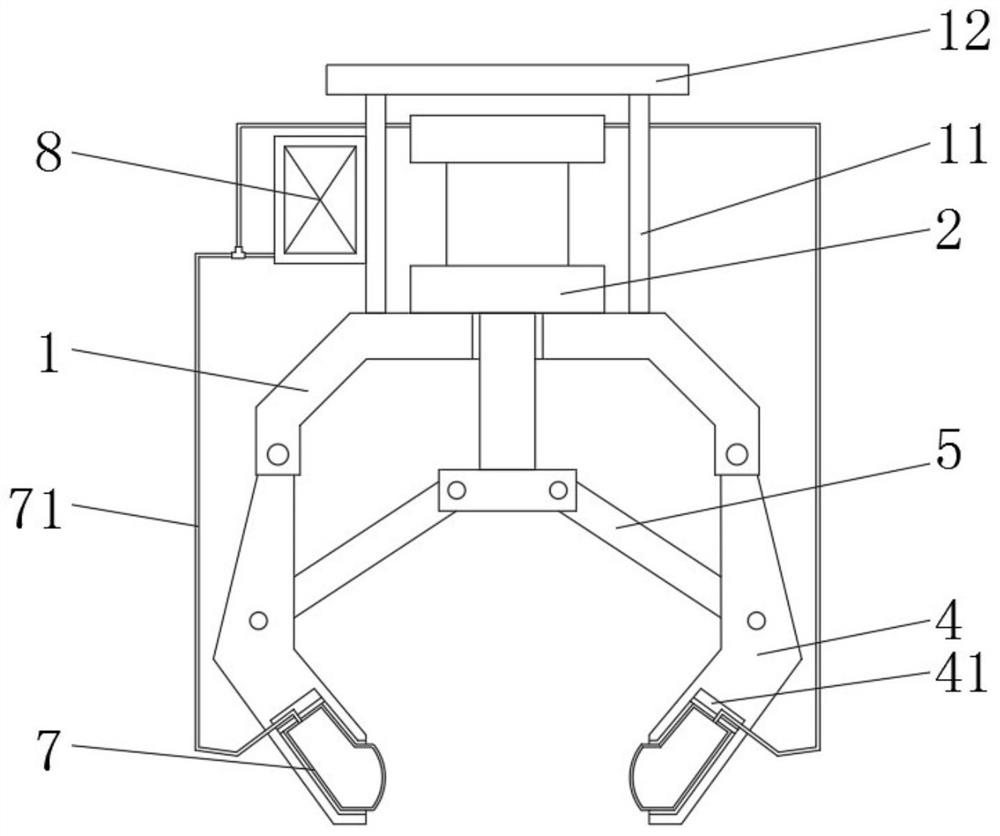
[0040] The lower end of the jaw 4 is provided with a holding groove 41, and a strength regulating air bag 7 is installed in the holding groove 41. The end can extend out of the receiving groove 41 to contact with the object, and the strength adjustment airbag 7 can exert a certain frictional force on the object clamped in the manipulator.
[0041] The outer wall of the vertical plate 11 is fixedly equipped with an air delivery assembly 8, the air delivery assembly 8 is connected with the strength adjustment airbag 7 through the air delivery pipe 71, the air delivery assembly 8 can deliver gas to the strength adjustment airbag 7, and the strength adjustment airbag 7 is filled with gas. After the gas is released, the protruding end can contact the side wall of the object, thereby generating a certain friction force on the object, so that the object can be firmly placed in the manipulator, effectively preventing t...
Embodiment 3
[0047] refer to Figure 5-8 , a further improvement made on the basis of Example 1:
[0048] The lower side of the connecting plate 3 is symmetrically installed with a strength adjustment assembly 9 front and back, and the strength adjustment assembly 9 can lift the object upwards, so that after the object is clamped by the manipulator, the hoisted object is supported by the strength adjustment assembly 9, and the object is supported by the strength adjustment assembly 9 by itself. The elastic force of the object lifts up the object, thereby reducing the gravity beared by the two jaws 4, so that the object is firmly placed between the jaws 4.
[0049] The force adjustment assembly 9 includes a circular sleeve 91 and a movable rod 92, one end of the movable rod 92 penetrates into the inside of the circular sleeve 91, and the two ends of the movable rod 92 are respectively fixedly connected with a limit plate 93, and the setting of the limit plate 93 can avoid The movable rod 9...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More