

Integrated surgical positioning and navigation system
An integrated technology of positioning and navigation, applied in the field of integrated surgical positioning and navigation system, can solve the problems of high price of navigation equipment, complicated operation process, and large space occupation, so as to improve the efficiency of surgery and the level of intelligence, simplify the conditions of use, The effect of improving usability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings.
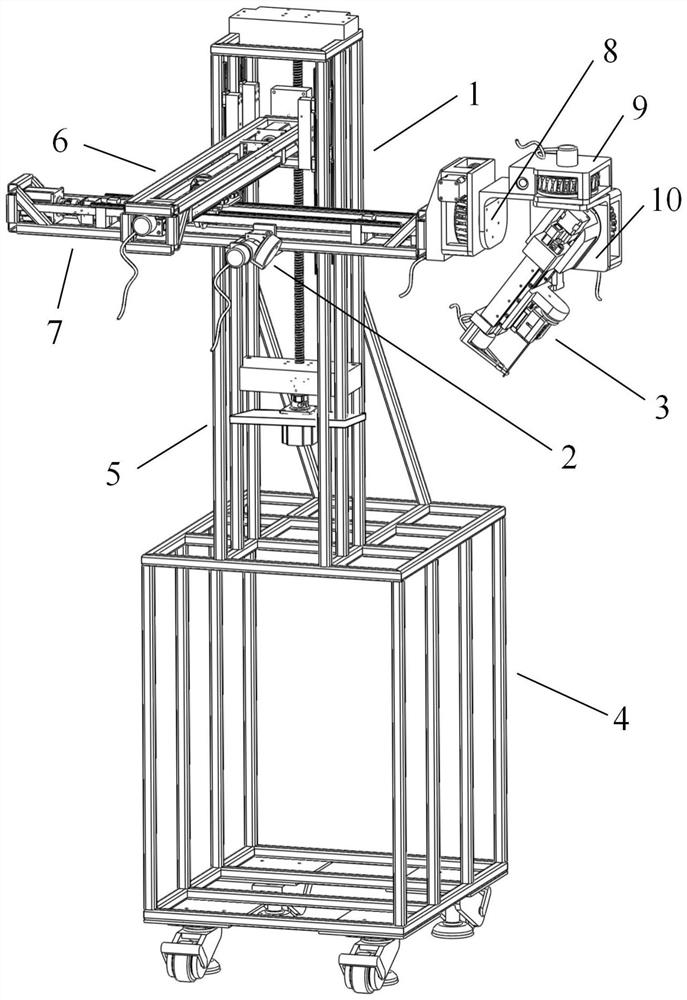
[0034] An example of the present invention, such as figure 1 Shown is an integrated surgical positioning and navigation surgical robot. The surgical robot consists of a multi-degree-of-freedom mechanical arm device 1 , a surgical positioning and navigation system 2 , and a surgical end effector device 3 . The multi-degree-of-freedom robotic arm device 1 includes a chassis unit 4 , a Z-axis moving platform 5 , an X-axis moving platform 6 , a Y-axis moving platform 7 , a roll adjustment unit 8 , a yaw adjustment unit 9 , and a pitch adjustment unit 10 . The multi-degree-of-freedom manipulator 1 is constructed by connecting the above units one by one.
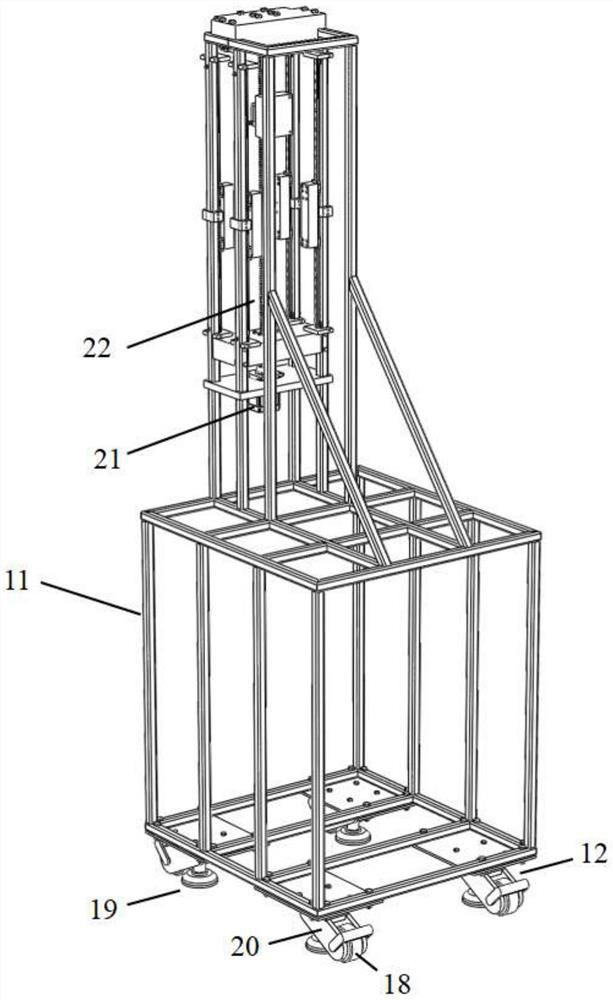
[0035] figure 2 The shown chassis unit 4 is mainly composed of a car body aluminum frame 11 and a universal fast anchoring wheel set 12. The universal fast a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More