Real driving scene simulation method and system, electronic equipment and storage medium
A driving scene and simulation method technology, applied in the fields of electronic equipment, storage media, systems, and simulation methods, can solve problems such as not supporting user-defined modification, weak scalability, fixed applicability, etc., to ensure test coverage and authenticity Accuracy, data sources and channels are diverse, and the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] Based on the multi-sensor data acquisition platform, the internal and external parameters between multiple sensors are calibrated and time-synchronized;
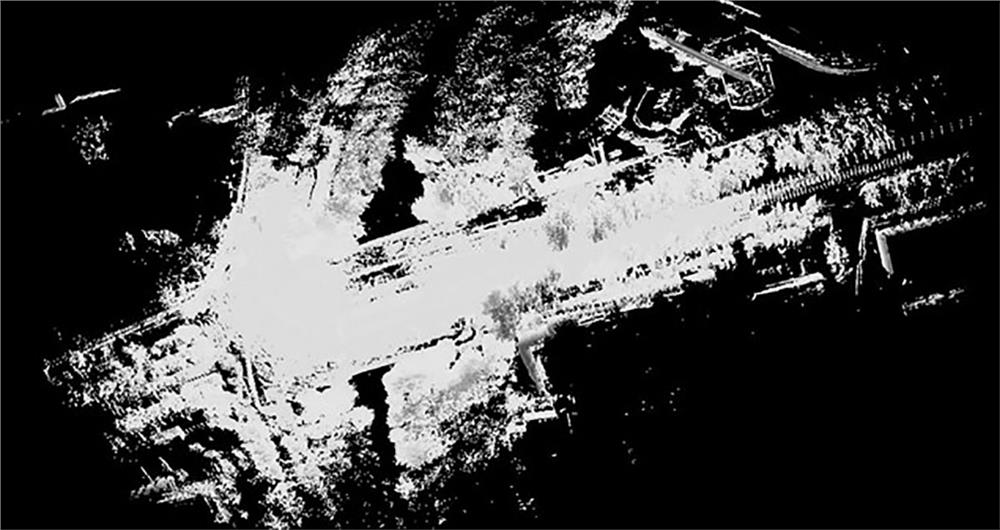
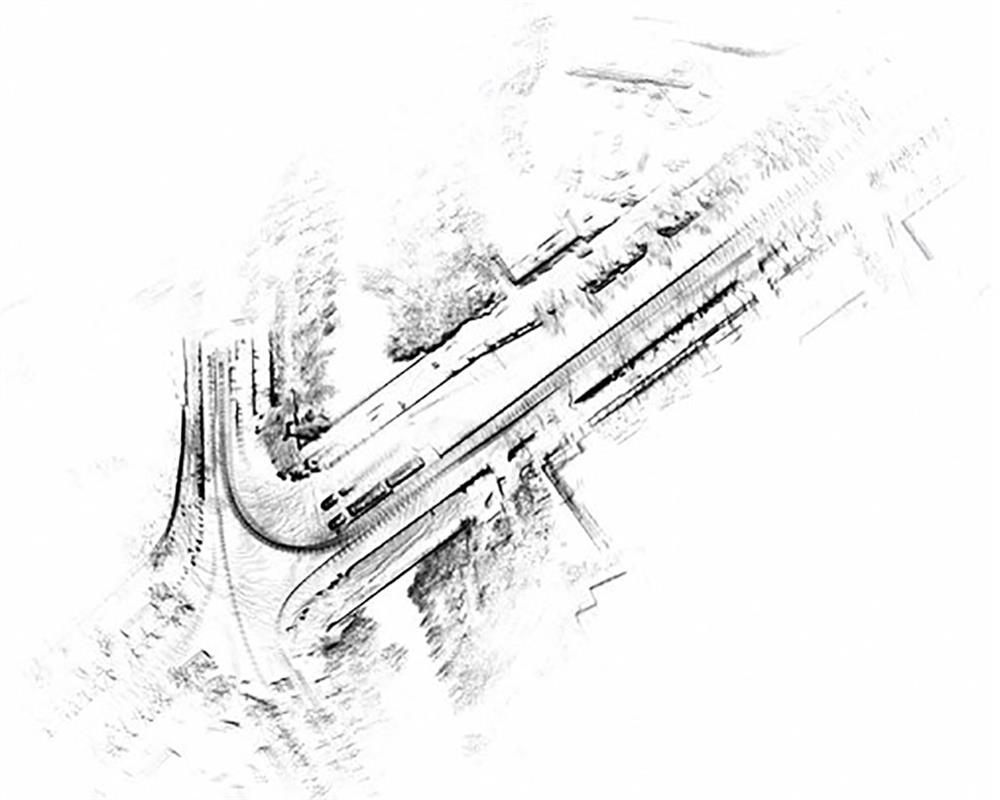
[0041] Build a 3D spatial map of the real scene and extract the road network data of the road in the scene;
[0042] Based on multi-sensor fusion data and 3D scene map data, the dynamic and static traffic elements in the real driving scene are marked and separated, and the local spatial position and type of the dynamic and static traffic elements in the real scene are output;
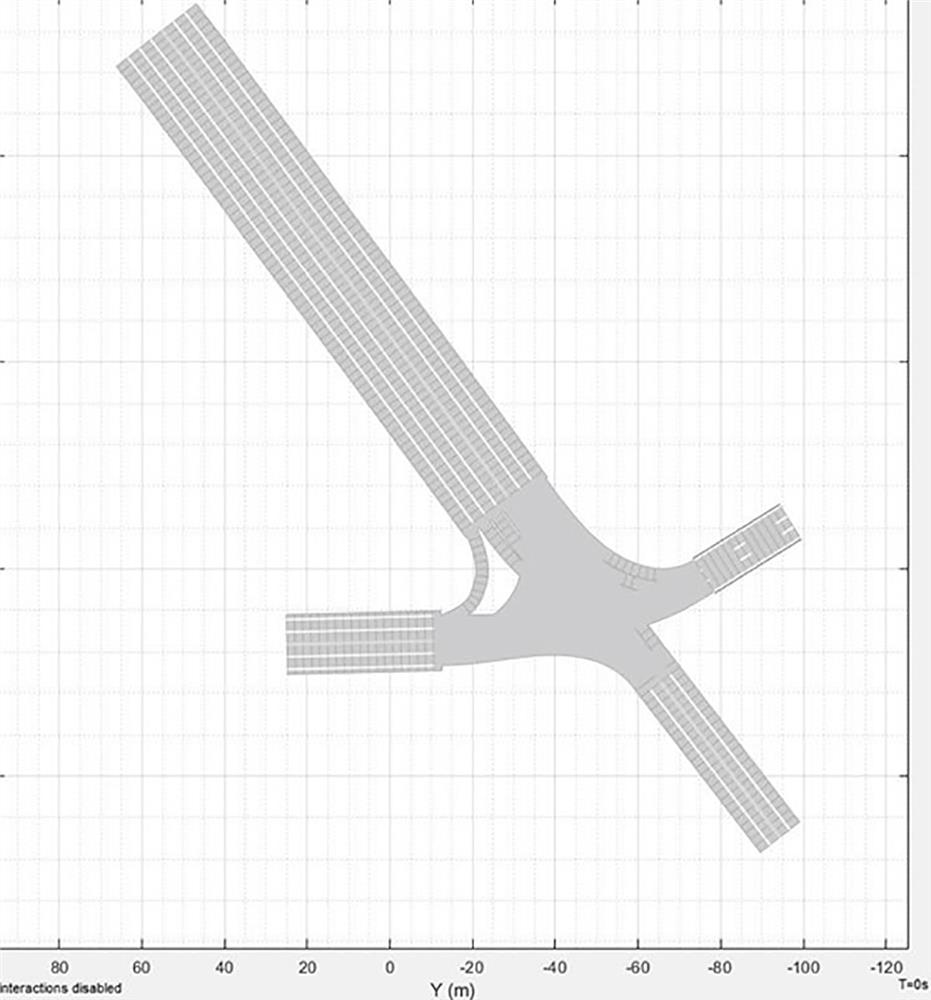
[0043] Generate the simulation scene file, reproduce the real driving scene and save it as a simulation scene library file that can be imported into the Carla simulation software platform.
[0044]The real driving scene simulation method disclosed in this embodiment is developed based on the open source simulation software platform of Carla. Considering the internal implementation of Carla, other simulation software platforms using the Server-...
Embodiment 2
[0050] Embodiment 2: On the basis of Embodiment 1, this embodiment extends the step of generating the simulation scene file, which includes two sub-processes: using the two-dimensional scene marked with the position information and type of static traffic elements Compress the map and road network data to construct a 3D model of the simulation scene; insert dynamic traffic elements according to the marked dynamic traffic element type and trajectory, add the FBX model data path, and complete the construction of a complete simulation scene library file. The other parts of Embodiment 2 are the same as Embodiment 1, and Embodiments 1 and 2 can be combined with other embodiments to form more embodiments. As long as there is no substantial conflict, it is feasible to combine with each other, limited by space No further details are given here.
Embodiment 3
[0051] Embodiment 3: This embodiment further expands and improves on the basis of Embodiment 1, Embodiment 2 and the combination of the two embodiments:
[0052] In the multi-sensor data fusion process based on the multi-sensor data acquisition platform, the sensors carried by the multi-sensor data acquisition platform include but are not limited to mechanical three-dimensional lidar, solid-state lidar, single / binocular industrial cameras, wide-angle cameras, inertial navigation, Common autonomous driving sensors such as ultrasonic and differential GPS; sources of multi-sensor data include but are not limited to self-driving collection, data purchase from map vendors, roadside unit collection and real vehicle road testing. The present invention uses self-driving acquisition as an example to illustrate the specific application of the entire process; the time synchronization process of multi-sensor data is realized by hardware pulse synchronization, that is, a hardware device tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com