

Self-adaptive fault-tolerant unmanned aerial vehicle tracking and cruising system and method
A cruising system and unmanned aerial vehicle technology, applied in the field of adaptive fault-tolerant unmanned aerial vehicle tracking and cruising system, can solve the problems of not finding dangerous objects, missing real-time monitoring results, etc., achieve good interference, ensure robustness, and eliminate static effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
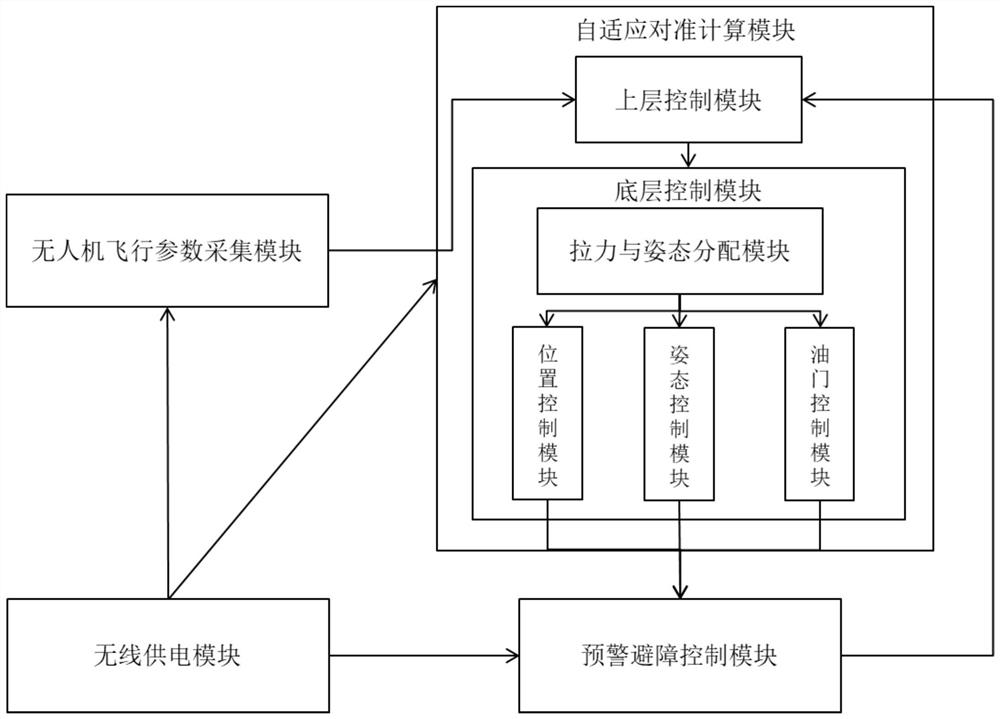
[0043] Such as figure 1 As shown, the adaptive fault-tolerant UAV tracking and cruising system provided by the present invention is used for real-time monitoring of UAV flight routes, and self-fault-tolerant early warning and flight control for it. It is characterized in that it includes UAV flight Parameter acquisition module, adaptive alignment calculation module, early warning and obstacle avoidance control module and wireless power supply module; the adaptive alignment calculation module includes an upper layer control module and a bottom layer control module, and the bottom layer control module includes a position control module, tension and Attitude allocation module, attitude control module and throttle control module, the tension and attitude distribution module controls the position control module, attitude control module and throttle control module to achieve the desired cruising route with the minimum tilt angle and power;
[0044] Said unmanned aerial vehicle fligh...
Embodiment 2
[0049] On the basis of Embodiment 1, the attitude controller adopted in this embodiment is a sliding mode controller, and the flight parameter acquisition module includes a UAV flight three-dimensional velocity acquisition module, an UAV flight three-dimensional attitude acquisition module, and a three-dimensional velocity acquisition module. It is used to collect the real-time flight speed and real-time flight acceleration of the UAV on the x-axis, y-axis and z-axis. The UAV flight three-dimensional attitude acquisition module is used to collect the real-time flight acceleration of the UAV on the x-axis, y-axis and z-axis , the UAV three-dimensional position acquisition module is used to collect the real-time flight position coordinate data information of the UAV on the x-axis, y-axis and z-axis, and the UAV three-dimensional moment acquisition module is used to collect the UAV on the x-axis, y-axis and the thrust torque data given by the throttle during real-time flight on th...
Embodiment 3
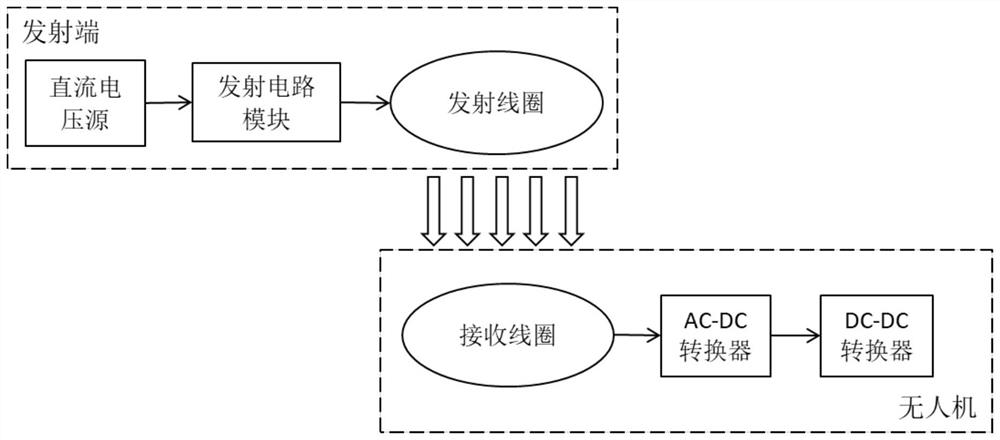
[0051] On the basis of Embodiment 1, the wireless power supply module provided in this embodiment is a battery inductive wireless power supply, such as figure 2 As shown, the wireless power supply module includes a DC voltage source provided at the transmitting end, a transmitting circuit module, a transmitting coil, a receiving coil, an AC-DC converter and a DC-DC converter provided on the drone.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More