

Low-altitude autonomous navigation system for rotary-wing unmanned plane
An autonomous navigation system and unmanned rotor technology, which is applied in the field of algorithm control of rotor UAVs, can solve the problems of huge weather influence, high cost, and inability to take off and land vertically, and achieve clear and accurate spatial data and attitude calculation accuracy High, reduce the effect of manpower and material resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
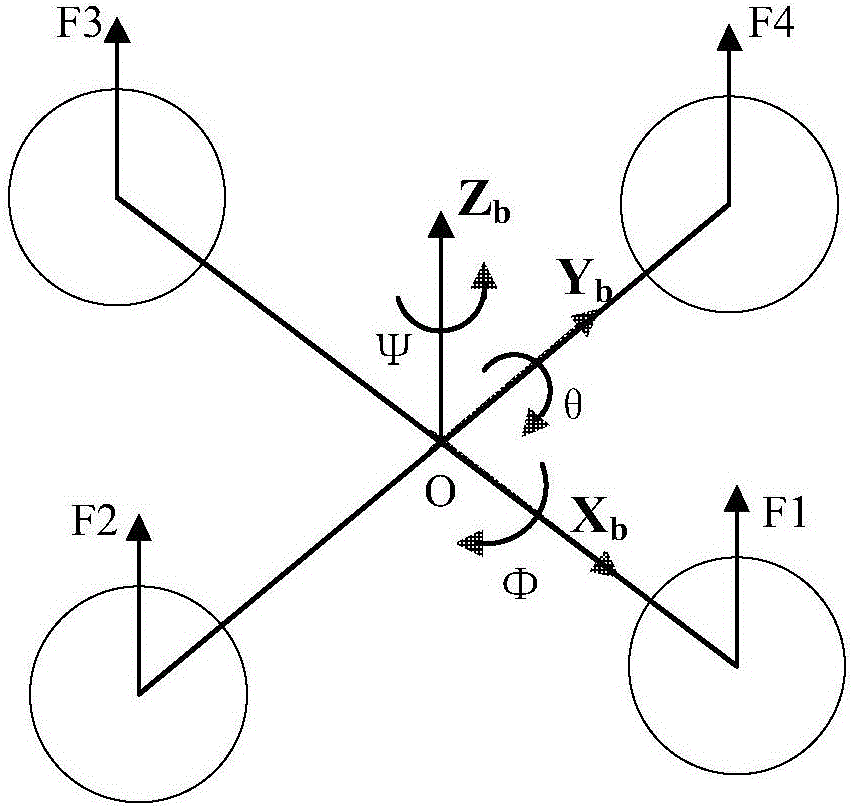
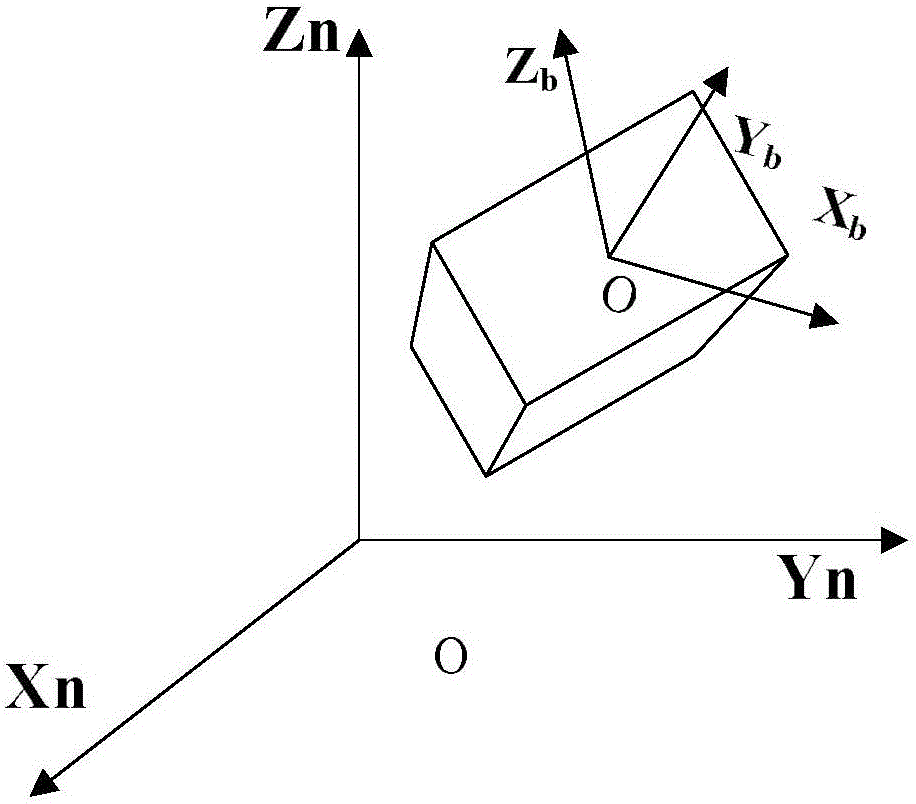
[0031] Figure 1a , Figure 1b Shown is a schematic diagram of the body coordinate system and geographic coordinate system of the quadrotor UAV. The origin O of the body coordinate system b is taken at the center of mass of the aircraft, and X b In the plane of the aircraft pointing to the front motor of the frame, Y b Pointing to the left motor in the aircraft plane, Z b perpendicular to X b OY b The plane goes straight up. The origin O of the ground coordinate system g is a point on the ground, Xg points to the North Pole, Xg points to the east in the horizontal direction, and Zg is vertical to the horizontal plane.
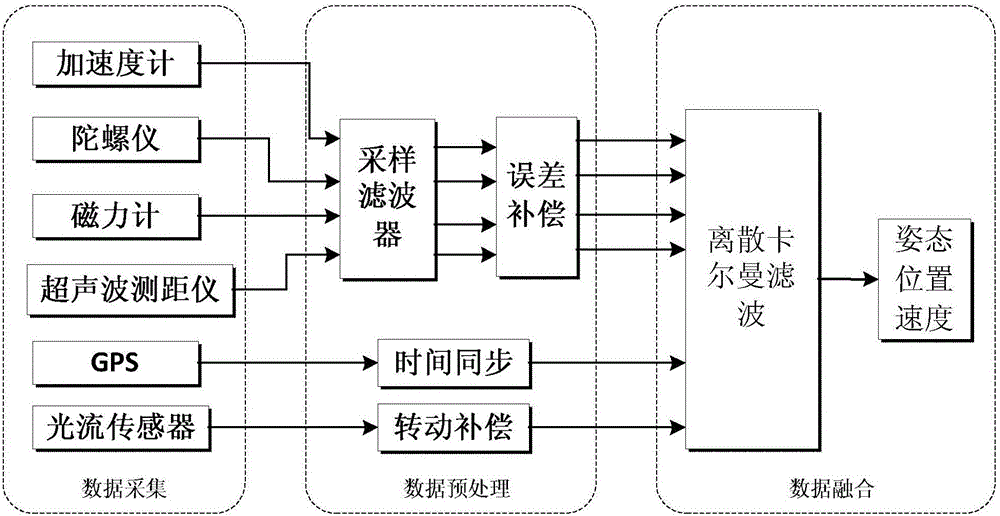
[0032] Such as figure 2 Shown is a schematic diagram of the structure of the data acquisition device, data preprocessing module, and data fusion module in the low-altitude autonomous navigation system of the rotor UAV. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More