

Vision-based cleaning area detection method
An area detection and vision technology, applied in the field of vision detection, can solve the problems of decreased distance calculation accuracy, high false detection rate, and increased deployment costs, and achieve accurate extraction, good accuracy, and improved extraction accuracy and stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to explain in detail the technical solutions adopted by the present invention to achieve the intended technical purpose, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described implementation Examples are only part of the embodiments of the present invention, rather than all embodiments, and, on the premise of not paying creative work, the technical means or technical features in the embodiments of the present invention can be replaced, the following will refer to the accompanying drawings and combine Examples illustrate the present invention in detail.
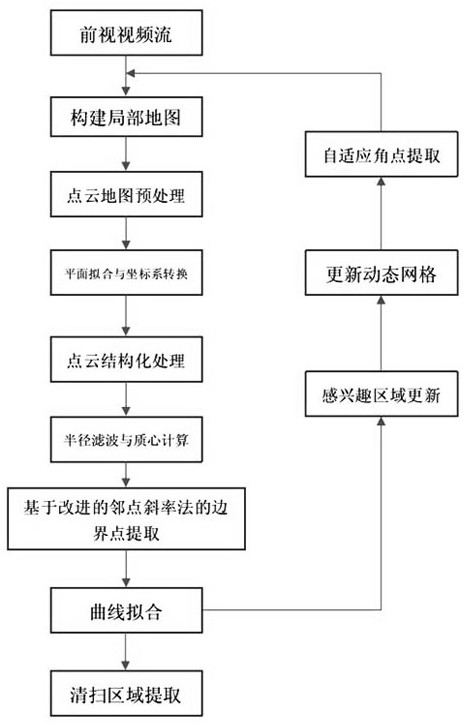
[0053] Such as figure 1 As shown, a kind of vision-based cleaning area detection method of the present invention comprises the following steps:
[0054] Step 1: Collect the video of the road surface information in front of the vehicle through the fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More