Multi-smart home mobile device and cooperative way-finding anti-collision method thereof
A mobile device and smart home technology, which is applied to road network navigators, instruments, navigation, etc., can solve the problems that smart home mobile devices are difficult to implement, and achieve the purpose of alleviating the pressure on the cloud computing terminal of the gateway, avoiding time delay, and avoiding inability to communicate Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0058] The present invention provides a body structure of a movable IoT device capable of realizing multi-smart home mobile devices cooperating with desktop pathfinding and anti-collision methods. Its specific structure is as follows:
[0059] Including smart home mobile device body, wheels that can adapt to multiple situations, vehicle equipment, steering servo, smart motor, power supply equipment and power supply wires, etc.
[0060] The vehicle-mounted equipment includes a camera connected to the esp main board, an accelerometer, a binocular ultrasonic ranging sensor in the middle of the side, an infrared radar sensor at the bottom of the side, an anti-drop sensor at the bottom of the car body, and a smart IC card data reader.
[0061] The Arduino Uno development board is used as the main board for communication, data transmission and device control, the esp main board is used as the main board for camera data collection and transmission, and the Jetson-nano development boa...
Embodiment 2
[0063] This example uses the Kalman filter model to predict the trajectory of other mobile IoT devices and avoid collisions. details as follows:
[0064] Collect and obtain data stage:
[0065] Observing the surrounding environment through the on-board camera of the car, that is, using the target detection algorithm through the jetson-nano main board to obtain the relative position and speed relationship of all obstacles and other movable IoT devices in the vicinity of the car in the current state. At the same time, the ultrasonic distance measurement in the middle of the car The sensor measures the distance of other objects to assist the camera to obtain the target position relationship and speed relationship.
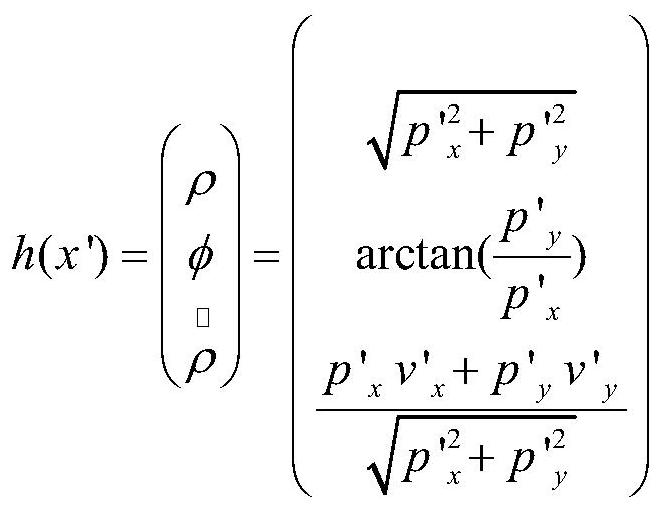
[0066] The relative position relationship between the object and the car is obtained by the infrared radar sensor on the side of the car, and the target speed is calculated through the Doppler effect. Since the radar data is in the form of polar coordinates, in orde...
Embodiment 3
[0081] This example is the specific implementation of desktop pathfinding and obstacle avoidance by using the trajectory prediction method based on the Kalman filter model of Example 2 and the joint cooperation method of multiple smart home mobile devices. details as follows:
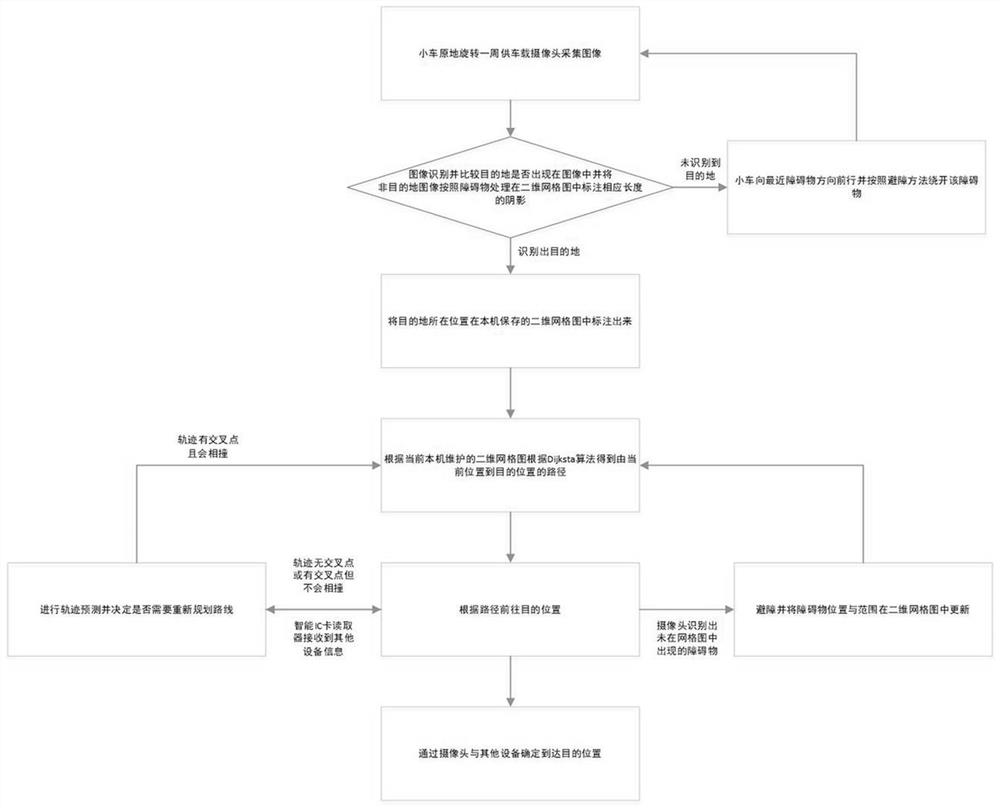
[0082] Step 1. Find the destination;
[0083] The communication motherboard Arduino Uno downloads the destination image information from the user through the Bluetooth module, and transmits the information to the computing motherboard jetson-nano through the connection device.
[0084] The strategy for finding the destination is generated by the computing board: if there is a destination in the image returned by the current camera, the destination is found; if there is no destination image in the current image, the car will be sent to the control board Arduino Uno to rotate the car on the spot for a circle.
[0085] If the destination is recognized in the image obtained by rotating one circle, the sear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com