

Unstructured road state parameter estimation method and system
A road state and parameter estimation technology, which is applied in the field of intelligent vehicle environment perception, can solve problems such as poor robustness, large parameter estimation error, and plane block strategy that does not consider the actual road conditions, so as to improve extraction accuracy and reduce model estimation Effect of Error, Accuracy on Estimation of Unstructured Road State Parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
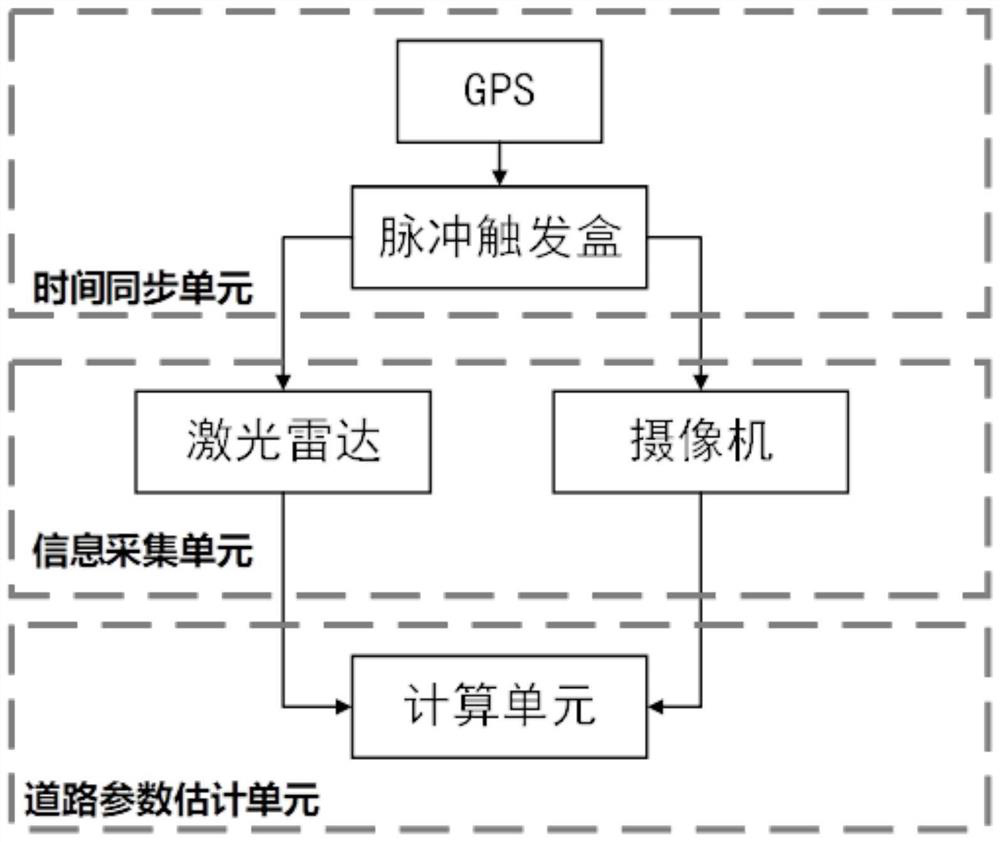
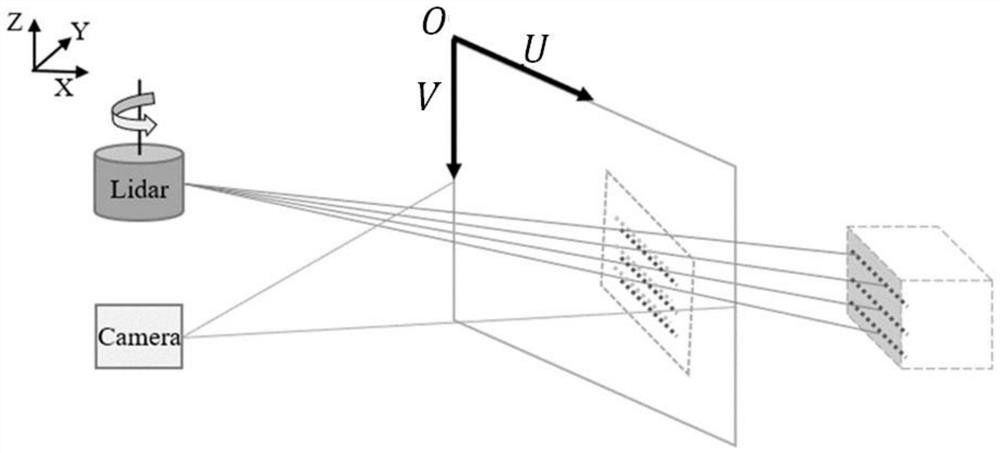
[0087] Step 1, time synchronization and space synchronization are performed on the point cloud data collected and the image data. Of which: number of point clouds
[0092]
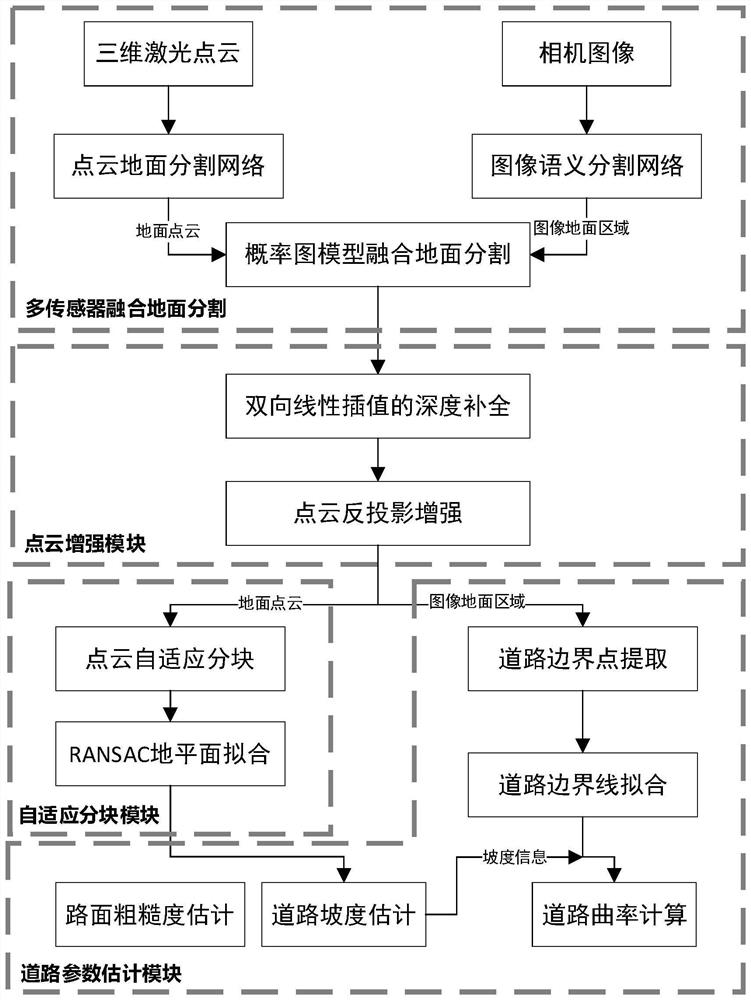
[0097] In step 23, the obtained sum is modeled using a probabilistic graphical model.
[0100] Also consider each pixel in as a node, and these nodes will be referred to as pixel nodes in the text
[0101] Obviously, a node corresponds to only one node probability value.
[0104] Situation 1: When the pixel node c
[0105] Case 2: When the pixel node c
[0109]
[0110]
[0112]
[0120]
[0121]
[0122]
[0124]
[0136]
[0137] In the formula, D represents the initial sampling set, and p( ) represents the probability distribution function.
[0143]
[0144] In the formula, m∈{1,2,...,M},represents the index value of the sample,n∈{1,2,...,N-1},represents the value of each sample
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More