

Two-stage active instant positioning and mapping algorithm based on graph topology
A two-stage, topology map technology, applied in computing, image analysis, 3D modeling, etc., can solve the problem of no scale index application, reduce computational complexity and space complexity, take into account SLAM accuracy, and improve positioning accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
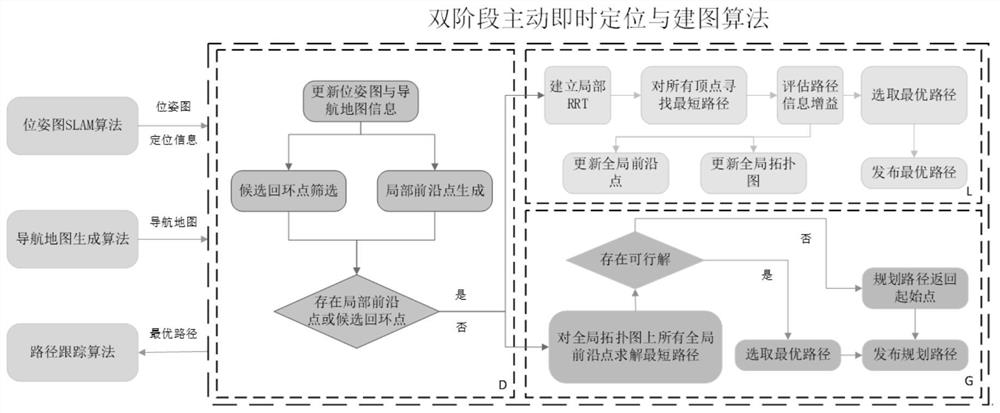
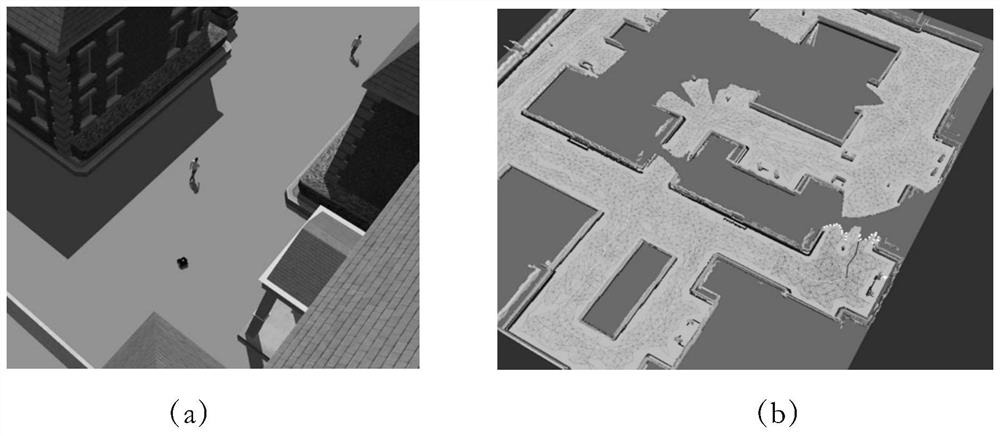
[0035] The invention proposes a two-stage active real-time positioning and mapping algorithm framework based on graph topology. The overall algorithm framework is as follows: figure 1 As shown, the effect of the algorithm is as follows figure 2 shown, where, figure 2 (a) is the simulation environment and the simulation car, figure 2 (b) shows the environment model established by the unmanned platform and the various topological maps generated during the autonomous exploration process.
[0036] Step 1. Local / Global Stage Decision Algorithm
[0037] First, the two-stage active real-time localization and mapping algorithm gives the pose graph G of the unmanned platform through a laser-inertial tightly coupled SLAM algorithm (lio-sam). p (V p , E p ), where V p is the historical key pose point set of the unmanned platform, E p is the observation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More