

Data fusion algorithm for accurate positioning based on GNSS, vision and IMU
A technology of precise positioning and data fusion, applied in the field of navigation and positioning, it can solve problems such as GNSS satellite signal loss, and achieve the effect of improving positioning performance and eliminating local accumulated errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be further described below with reference to the accompanying drawings.
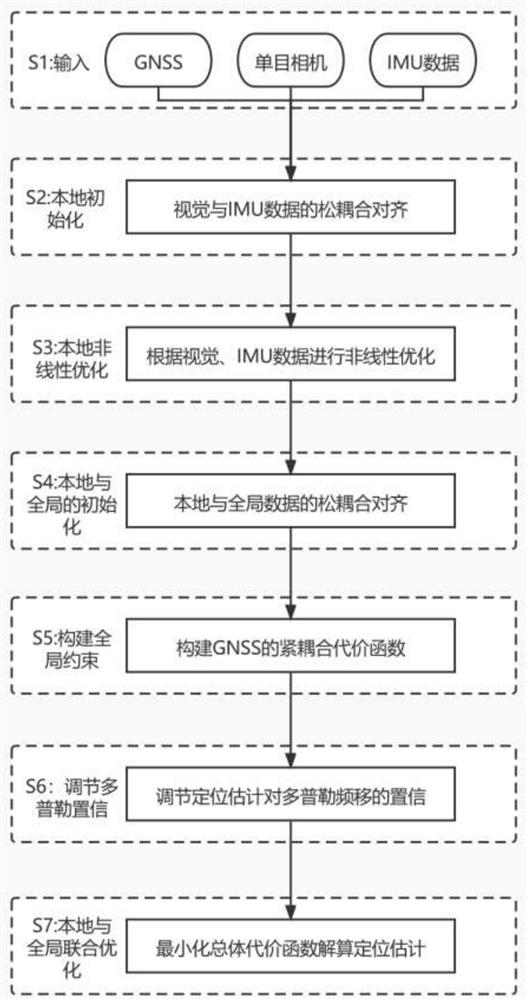
[0020] The invention discloses a data fusion algorithm for precise positioning based on GNSS, vision and IMU. The flow chart of the specific embodiment of the present invention is as follows figure 1 shown:
[0021] Step S1: Mount a GNSS satellite signal receiver, a monocular camera and an IMU module on the mobile device, and collect GNSS signals with a frequency of 10 Hz, image data with a frame rate of 30 fps, and IMU data with a frequency of 200 Hz during the moving process, as the whole process. Input to the positioning algorithm. The raw data of GNSS includes ephemeris, pseudorange Doppler shift Clock and other information, the input data of the camera is a continuous sequence of image frames, and the input data of the IMU is the linear acceleration α and rotational angular velocity ω information of a series of objects.
[0022] Step S2: Initialize and align ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More