

Multi-contact-point force distribution method and system for racemization of operation target of multi-wheel-arm robot
A technology of manipulating targets and multi-contact points, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem that the manipulator cannot withstand the impact of the target, and achieve the effects of avoiding impact, ensuring safe contact, and ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the objectives, technical solutions and advantages of the present invention clearer, the embodiments disclosed in the present invention will be described in further detail below with reference to the accompanying drawings.
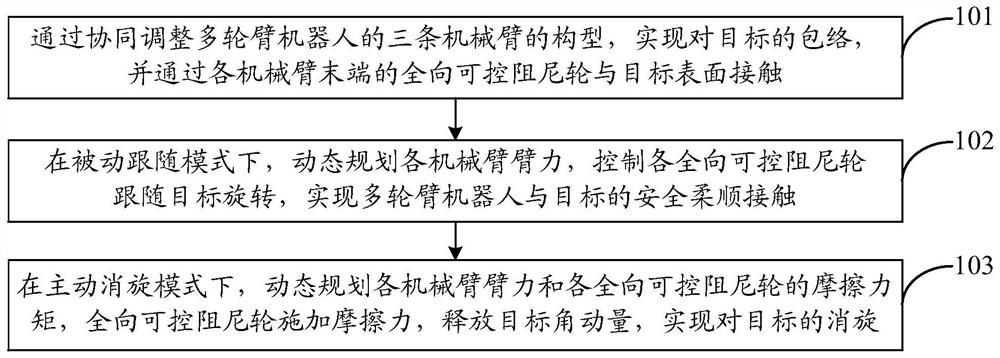
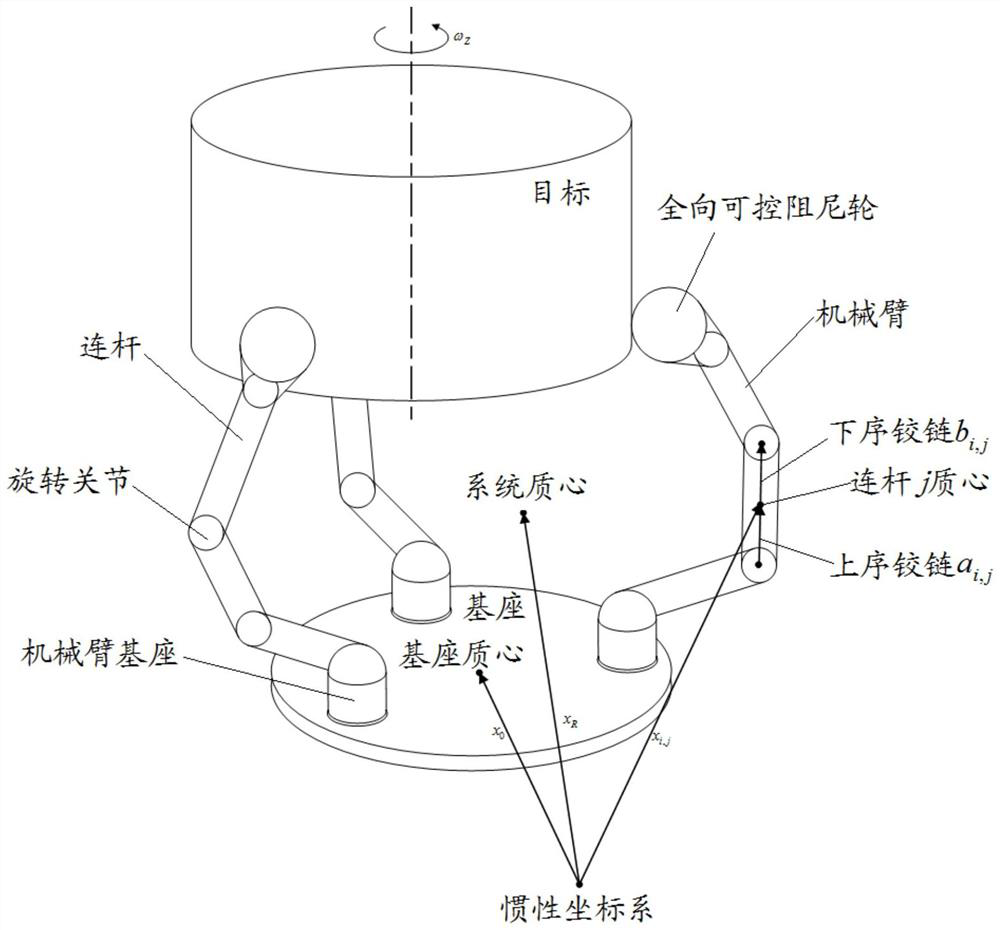
[0052] One of the core ideas of the present invention is that the multi-wheel arm robot has the characteristics of multi-rigid bodies, strong coupling and high nonlinearity when contacting a large-scale space spin target. How to solve the challenges posed by complex dynamic contact surface motion, plan a multi-contact force distribution strategy and achieve whole-body compliant contact and smooth racemization is one of the key issues for large-scale spin target manipulation. In order to solve the above problems, the present invention proposes a multi-contact force distribution scheme for multi-arm robot operation target derotation. Envelope the large space spin target and make contact with the surface of the large space spin target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More