

Fast space robot simulation modeling method and system
A technology of space robots and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as large-scale software, complex control program interface processing, and poor autonomous controllability of codes, so as to avoid black boxes and reduce environmental compatibility sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0046] The present invention will be further elaborated below in conjunction with the examples.
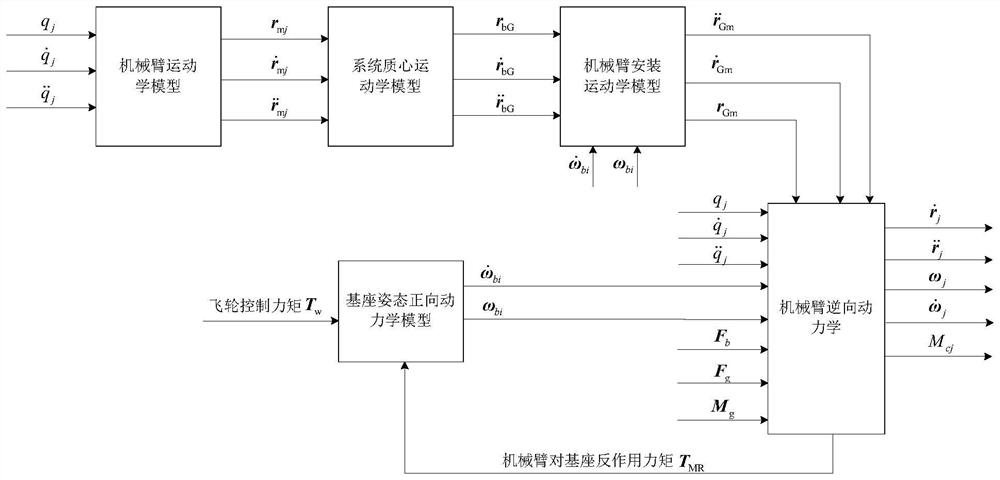
[0047] The process of realizing the simulation modeling of the space robot in the present invention is as follows:
[0048] (1) Establish the kinematics model of the manipulator. The model input is the joint angle q of the manipulator j , joint angular velocity and joint angular acceleration (The subscript j represents the j-th arm), and the output is the position r of each arm of the manipulator relative to the coordinate system (m system) of the manipulator. mj ,speed with acceleration (see figure 1 ).
[0049] (1.1) Calculate the relative motion angular velocity Ω of each arm relative to the inscribed arm j and angular acceleration The calculation formulas are and where l j is the unit direction vector for each joint rotation;
[0050] (1.2) Calculate the angular velocity ω of each arm relative to the coordinate system (m system) of the robot arm installation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More