

Control method of cell localization probe
A cell positioning and control method technology, applied in the control field of cell positioning probes, can solve problems such as increased system cost and complexity, reduced system success rate, and low control accuracy, so as to improve work efficiency and stability, and increase average Speed, improve the effect of finding efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
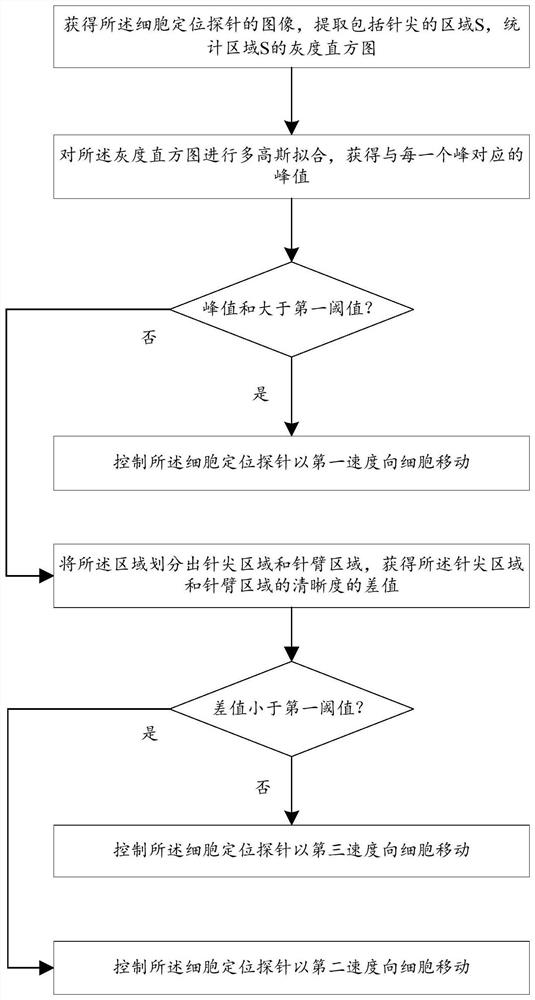
[0027] figure 1 The flow chart of the control method of the cell localization probe in Example 1 of the present invention is schematically presented, as figure 1 As shown, the control method of the cell localization probe includes speed control of the cell localization probe, and the speed control method is:
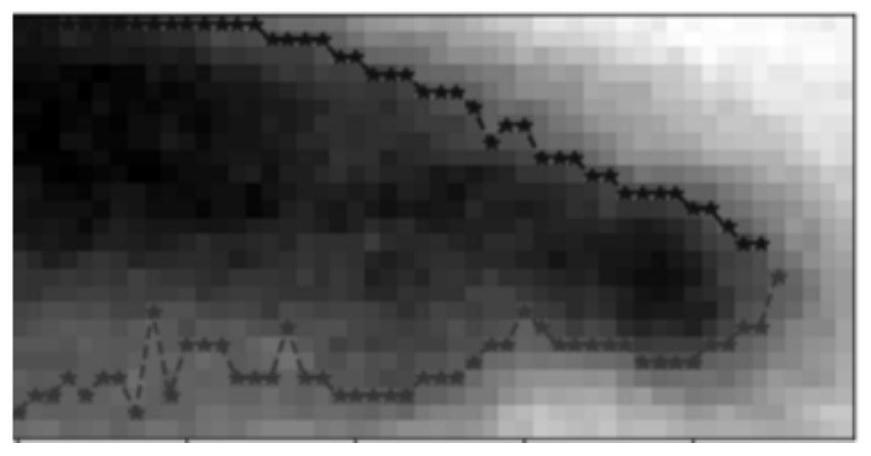
[0028] To obtain an image of the cell localization probe, extract the region S including the tip, as figure 2 shown, the grayscale histogram of the statistical region S;
[0029] Perform multi-Gaussian fitting on the grayscale histogram, such as image 3 shown, obtain the peak value A corresponding to each peak i , i=1,2...n, N is an integer not less than 2;
[0030] If the peak and H 1 is the first threshold, the peak and as Figure 4 As shown, control the cell localization probe at a first velocity v 1 move to cells
[0031] If the peak and Divide the area S into a needle tip area and a needle arm area, and obtain the difference ΔR between the sharpness of...
Embodiment 2
[0050] An application example of the control method of the cell localization probe according to Embodiment 1 of the present invention.
[0051] like figure 1 As shown, the control method of the cell localization probe includes the speed control of the cell localization probe, and the speed control method is as follows:
[0052] To obtain an image of the cell localization probe, extract the region S including the tip, as figure 2 shown, the grayscale histogram of the statistical region S;
[0053] Three Gaussian fitting is performed on the grayscale histogram, such as image 3 shown, obtain the peak value A corresponding to each peak i , i=1, 2...N, N=3;
[0054] If the peak and H 1 =50, the peak sum as Figure 4 As shown, control the cell localization probe at a first velocity v 1 move to cells
[0055] If the peak and The area S is divided into a needle tip area and a needle arm area, and the division method is as follows:
[0056] Extract the edge of the area S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More