Soft tissue deformation method based on metaball model driving
A model-driven, soft tissue technology, applied in the field of virtual surgery, to meet the real-time requirements of the system, good deformation effect, and smooth soft tissue surface.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further described below in conjunction with other drawings and specific embodiments.
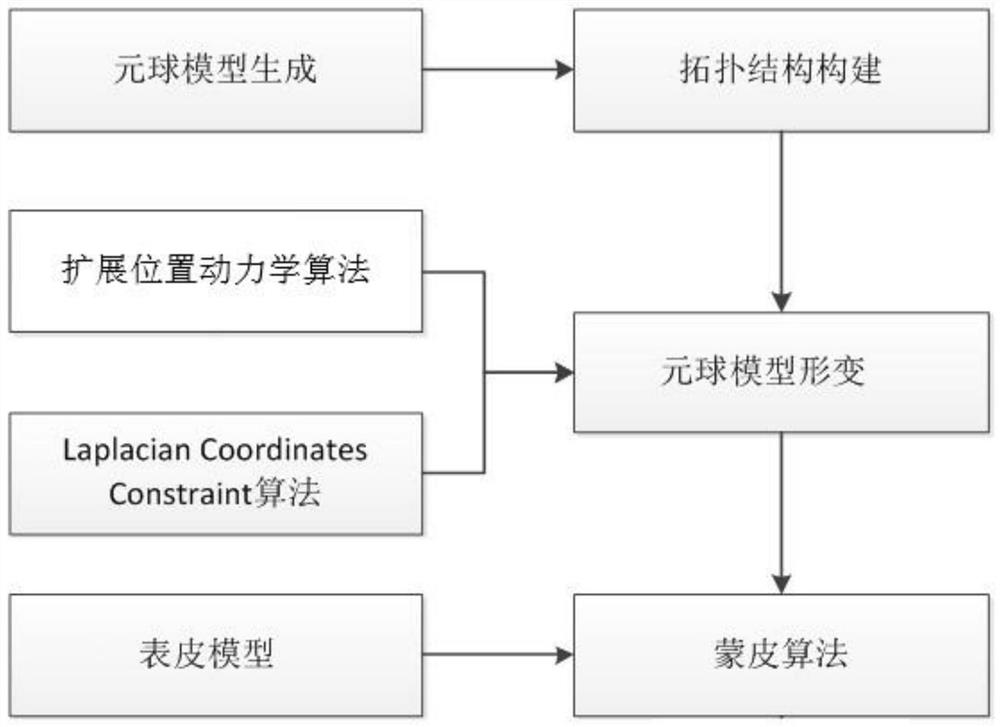
[0063] like figure 1 As shown, the present invention provides a soft tissue deformation method driven by a metaball model, and the main steps are as follows:
[0064] 1. Construction of the topological structure of the meta-sphere model and its optimization method
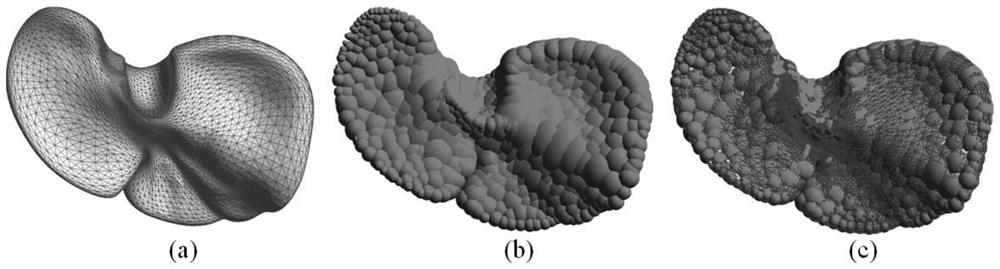
[0065] First use the BradshowGareth ball tree generation algorithm, based on the original triangular mesh model ( figure 2 (a) in) generate a Voronoi diagram, and according to the Voronoi diagram, generate the required meta-sphere model, such as figure 2 shown in (b). figure 2 (c) in (c) shows the comparison results of the mesh model and the metasphere model together. from figure 2 It can be seen that the generated meta-sphere model fits well with the triangular mesh model.
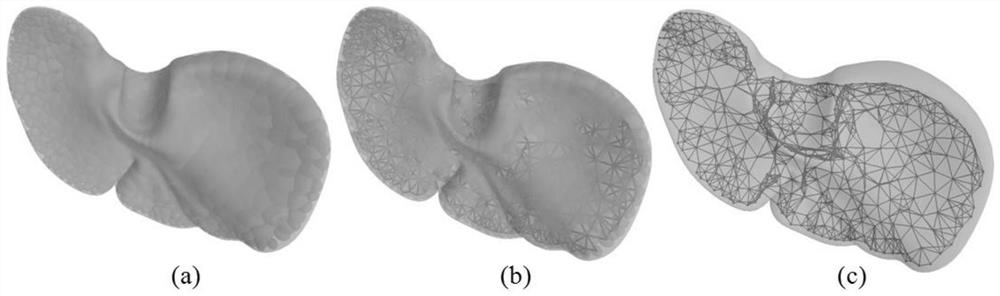
[0066] On the basis of the obtained meta-sphere model, the topology structure is constructed, and the followi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



