

Pectoral fin flapping type robotic fish formation control method under directed fixed communication topology
A technology of communication topology and control method, which is applied in the control field of bionic robotic fish, can solve the problem of no effective formation control method for the collaborative control of bionic robotic fish groups, and achieve good formation completion, good stability, and reduced load. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
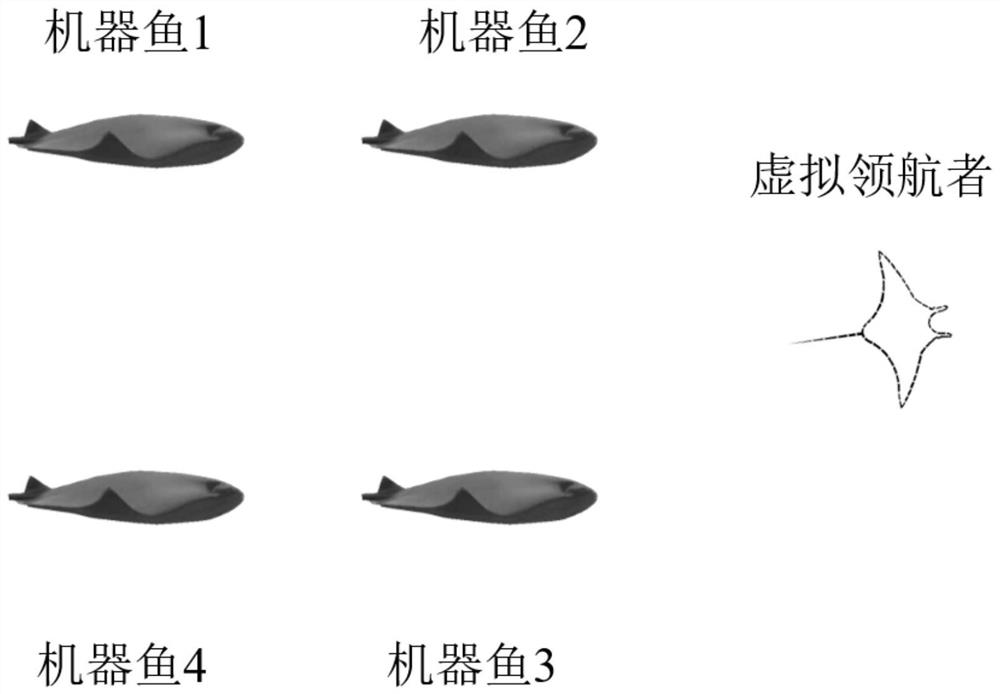
[0236] The following is a simulation analysis of the formation control of the pectoral fin flapping robotic fish during the movement process realized by the above method. The virtual navigator process is as follows:
[0237] The desired formation of the robotic fish is set relative to the virtual leader with the following values:
[0238]
[0239] Among them, the last row in the matrix h indicates that the virtual leader has no position error with itself.
[0240] The initial position selection is:
[0241]
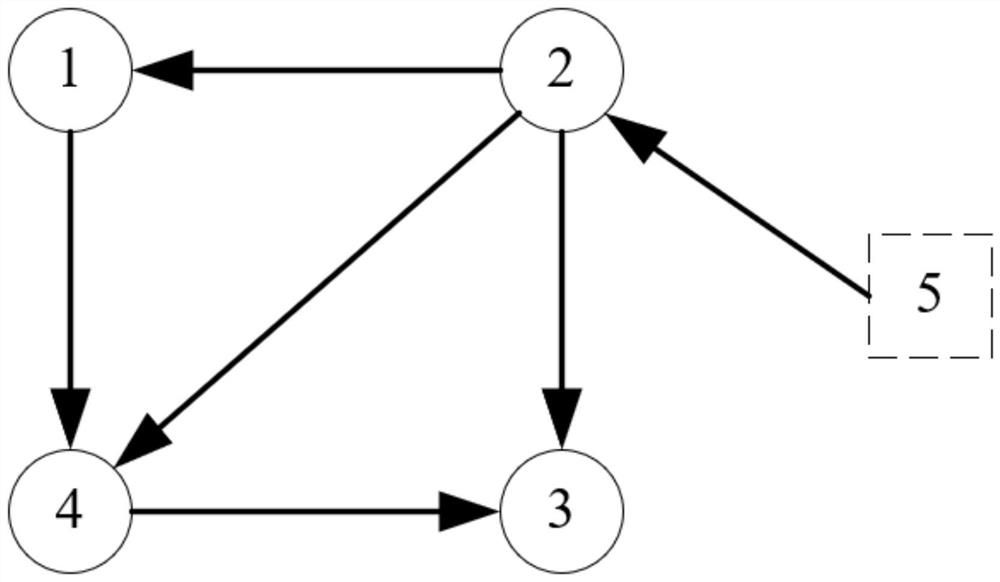
[0242] according to image 3 The Laplace matrix corresponding to the designed communication action topology diagram is:
[0243]
[0244] The simulation results are expressed as:
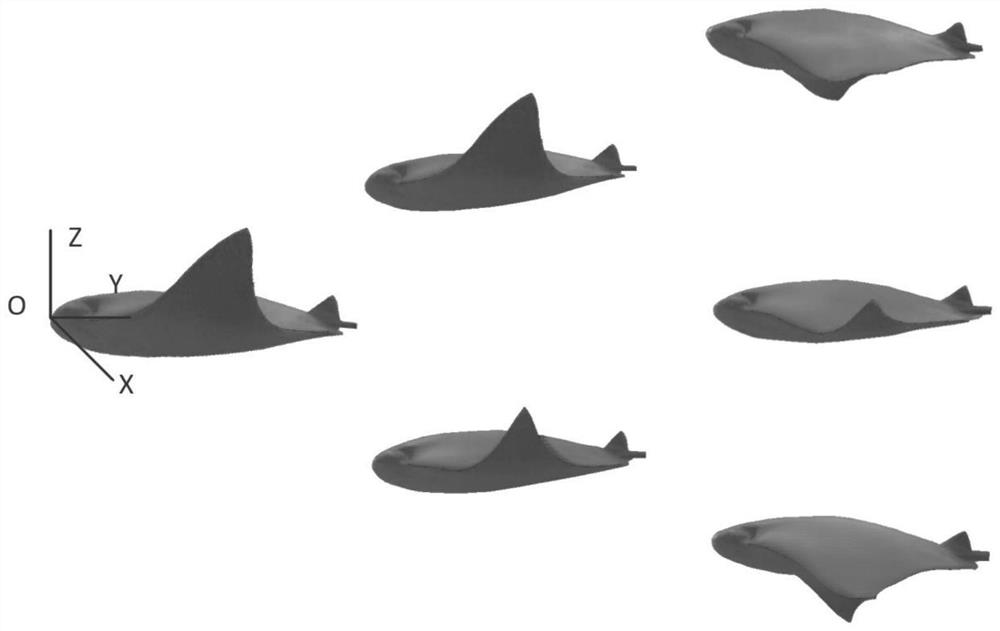
[0245] During the simulation process, the position and attitude change process of the multi-pectoral fin flapping robotic fish group is as follows: Figure 7 a shows the location distribution and communication topology of the multi-pectoral-fin flapping robotic fish population at ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More