Restrained three-degree-of-freedom mechanical arm fixed path point motion control system
A technology of motion control system and fixed path, applied in manipulators, program control manipulators, manufacturing tools, etc., can solve the problems of not considering the rationality of trajectories, reducing applicability, etc., and achieve strong robustness and adaptability, model adjustment The effect of large speed range and torque output range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
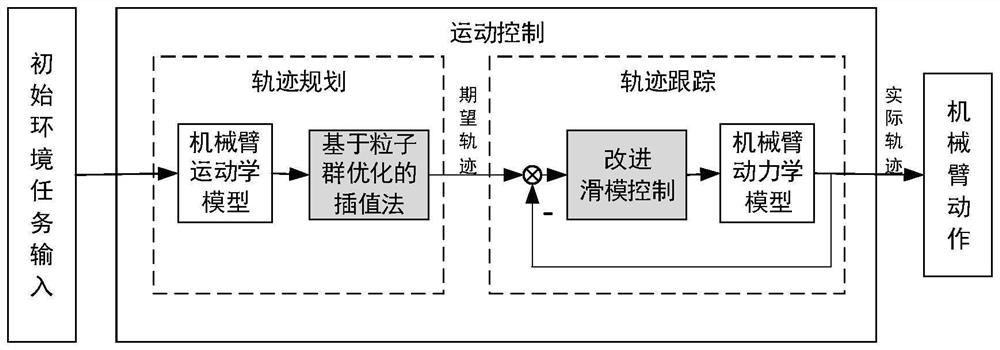
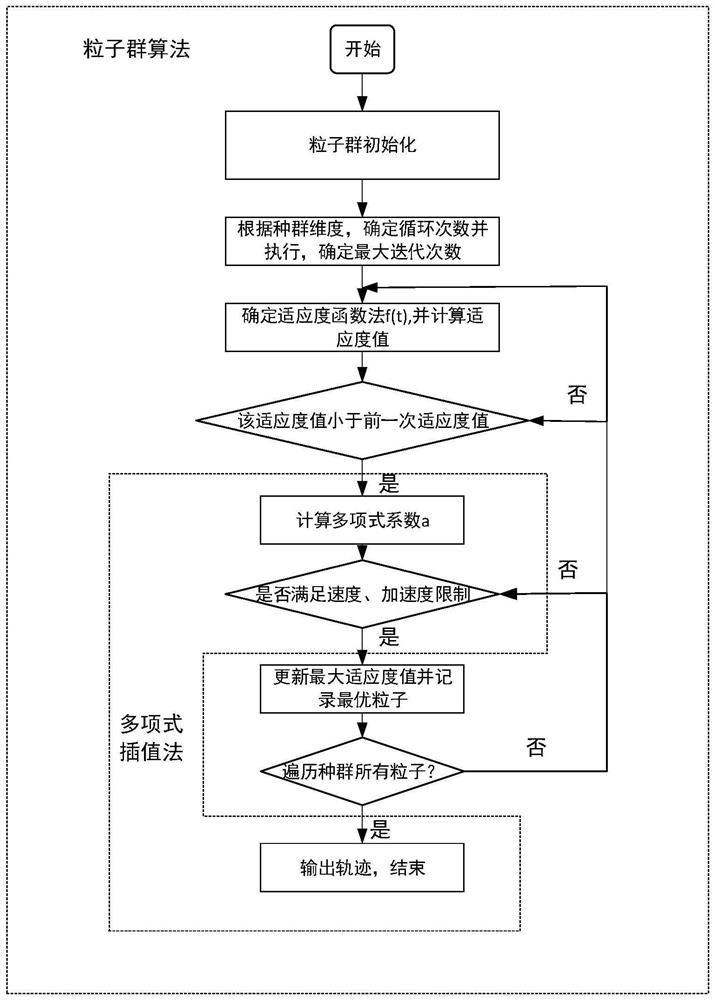
[0056] see Figure 1 to Figure 7 As shown, the present invention relates to a constrained three-degree-of-freedom manipulator arm fixed path point motion control system. The Euler-Lagrange method is used to establish the dynamic model of the manipulator arm, and its state space expression form is given, based on The particle swarm algorithm calculates the motion planning of the dynamic model of the mechanical arm, and the dynamic equation of the dynamic model of the mechanical arm is:
[0057]
[0058] Among them: q=[q 1 ,q 2 ,q 3 ] T is the angle vector of the system; τ = [τ 1 ,0,τ 3 ] T is the control torque vector; M(q)∈R 3 ×3 is the inertia matrix, with positive definiteness and symmetry; is the combined vector of Coriolis force and centrifugal force.
[0059] Then the state space form of the system model is:
[0060]
[0061] in:
[0062] f(x)=[x 4 ,x 5 ,x 6 ,f 1 ,f 2 ,f 3 ]
[0063] g(x)=[g 1(x) ,g 2(x) ,g 3(x) ] T
[0064]
[0065] x is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com