Industrial robot calibration method based on laser tracker through point-line-plane system establishment
A technology of laser tracker and industrial robot, which is applied in the direction of manipulators, manufacturing tools, program control manipulators, etc., can solve the problem of insufficient positioning accuracy and achieve the effect of improving absolute positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
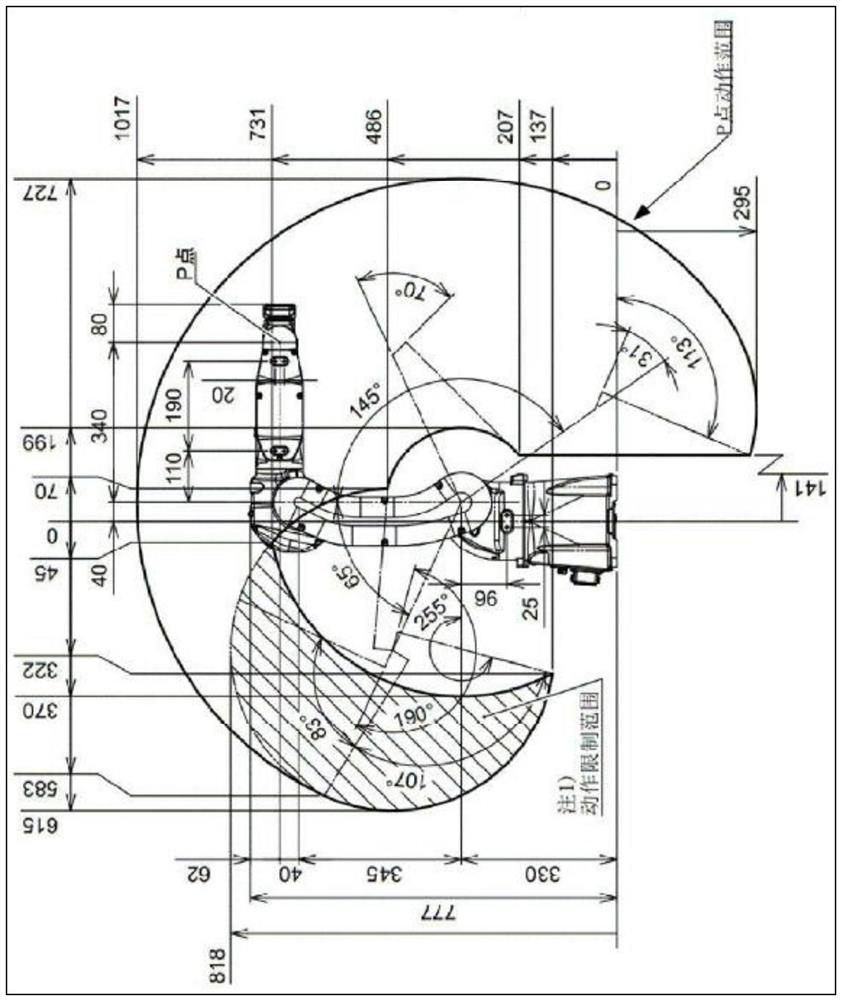
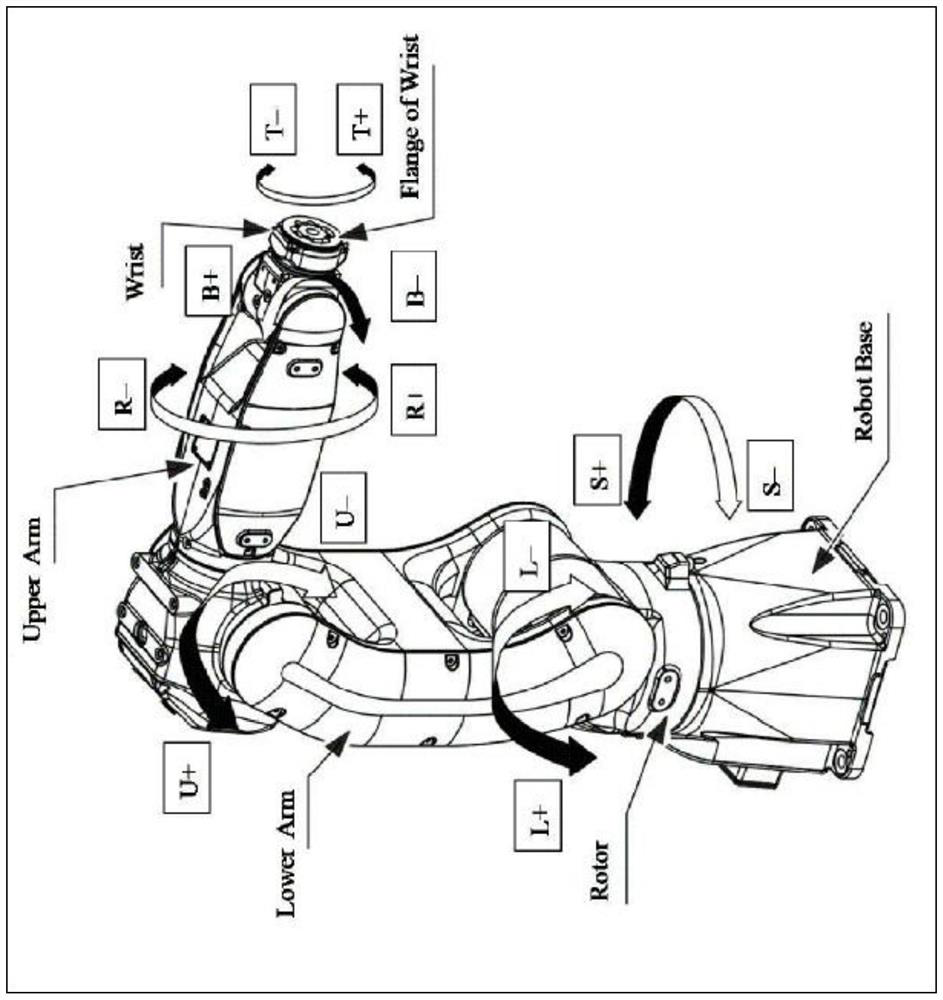
[0051] Attached to the following Figure 1-15 This application will be described in further detail.
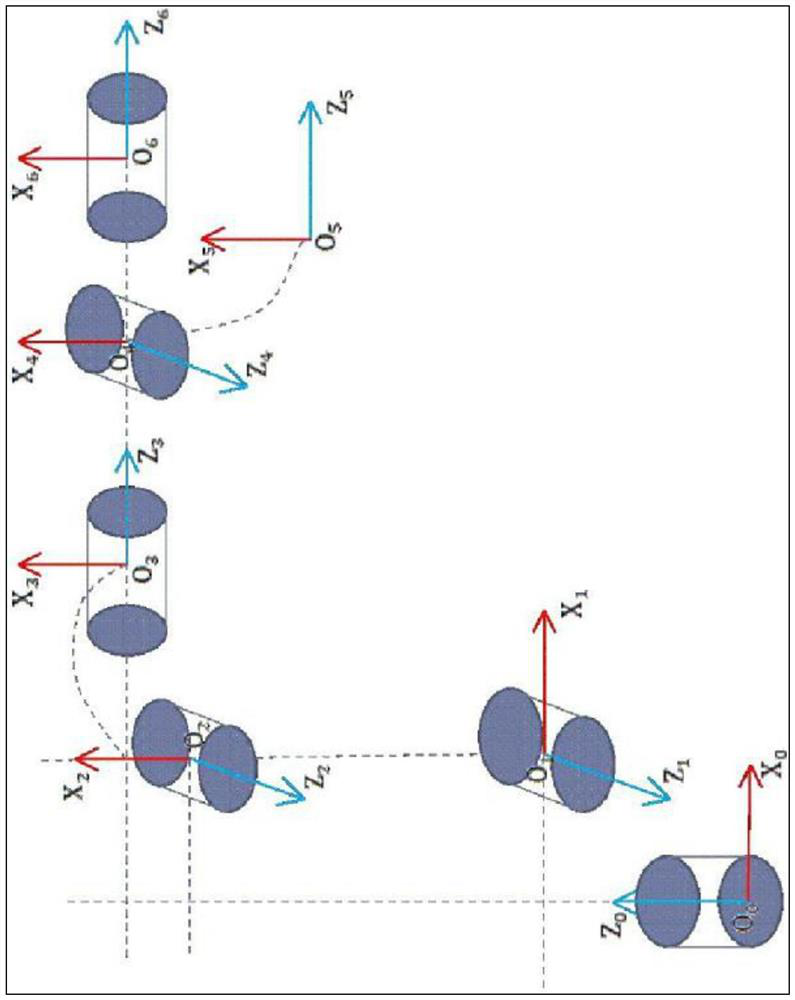
[0052] The embodiment of the invention discloses an industrial robot calibration method based on a laser tracker to establish a system through a point, line, and a plane. refer to Figures 1 to 15 , the first step of robot calibration is kinematic modeling, the purpose of which is to establish the coordinate system transformation relationship between adjacent joints. Currently, DH modeling methods are widely used in industrial robots.
[0053] According to the DH modeling rule, a 4x4 homogeneous transformation matrix is used to describe the translation and rotation of adjacent joint coordinate systems. The homogeneous matrix transformation of the adjacent joints of the robot is shown in formula (1):
[0054]
[0055] (1);
[0056] Between adjacent links, the first joint is the driving joint, and the latter joint is the passive joint. In formula (1), is around ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap