Graph neural network-based reinforcement learning cluster swarming control method
A technology of reinforcement learning and neural network, applied in the field of deep reinforcement learning cluster swarming control, can solve the problems of weakening the performance of the control algorithm, not considering the equivalence of agents, etc., and achieve the effect of improving the convergence speed and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0126] The technical solutions of the present invention are further described in detail below with reference to the accompanying drawings, but the protection scope of the present invention is not limited to the following.
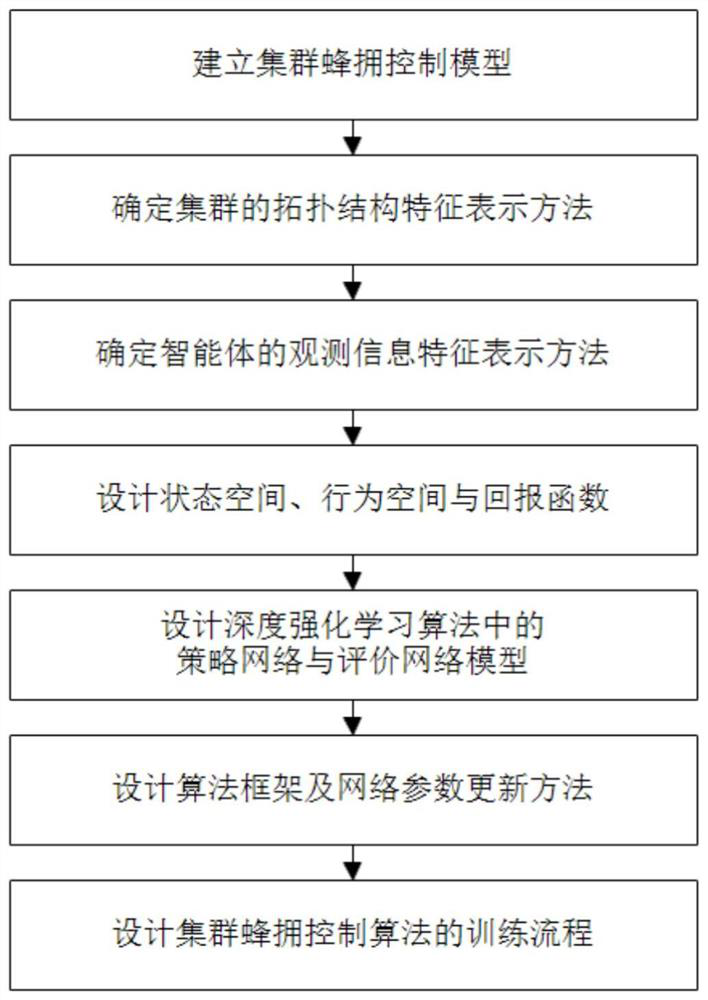
[0127] like figure 1 As shown, the present invention provides a reinforcement learning cluster swarming control method based on a graph neural network, comprising the following steps:
[0128] Step S1, establishing a cluster swarming control model, the cluster should gradually form a stable topology and keep the same speed after a limited number of swarming controls, and the system error should tend to 0 after stabilization;
[0129] Step S2, the entire cluster system is regarded as an undirected graph G, the adjacency matrix of the undirected graph G is A, and the swarming control error is introduced into the adjacency matrix A of the undirected graph G, and the weighted adjacency matrix is obtained. Based on weighted adjacency matrix The topological...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More