

Automatic deviation correction control method of magnetic guidance AGV based on visual SLAM and storage medium
An automatic deviation correction and control method technology, which is applied in the field of robots, can solve the problems that the indoor equipment inspection and maintenance of traction substations cannot be realized in time, and the railway transportation system is unstable, so as to achieve truly unmanned on-duty and eliminate tire slippage and accumulation Influence of error, effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the purposes, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments These are some embodiments of the present invention, but not all embodiments.
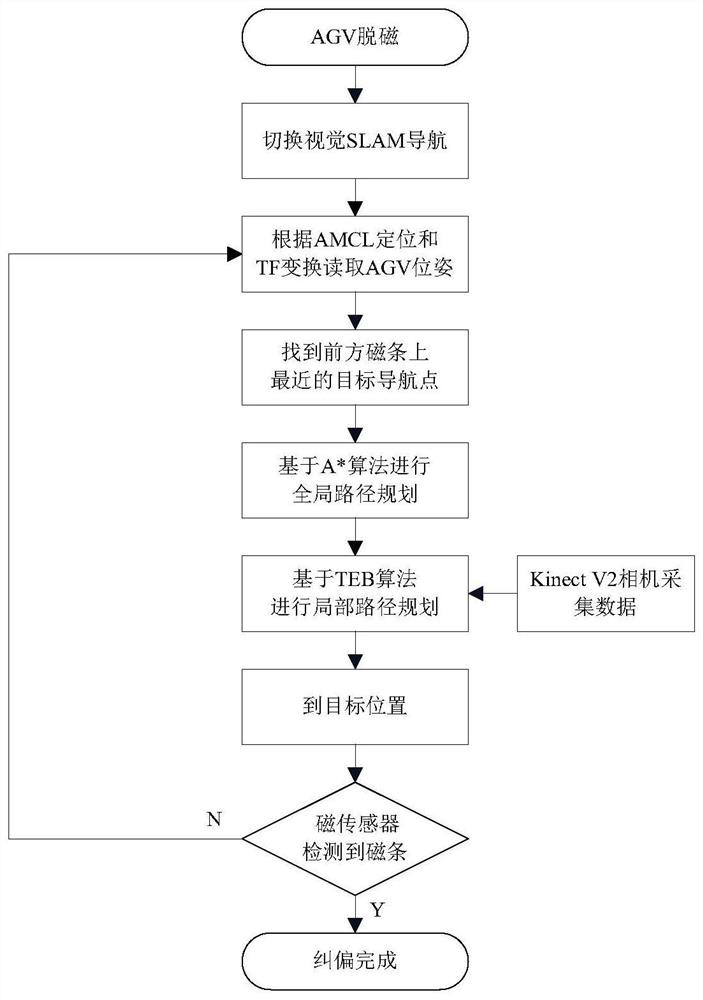
[0054] In this embodiment, an automatic deviation correction control method of a magnetically guided AGV based on visual SLAM is carried out according to the following steps:
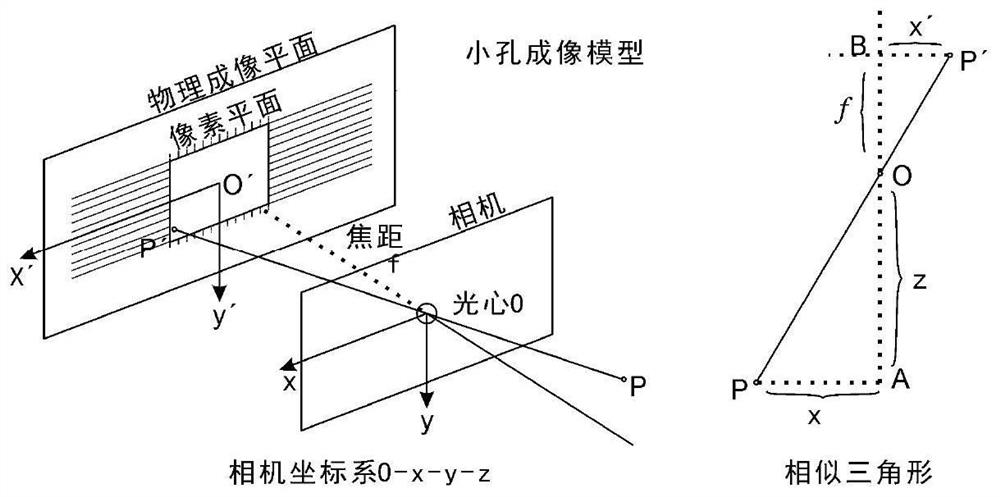
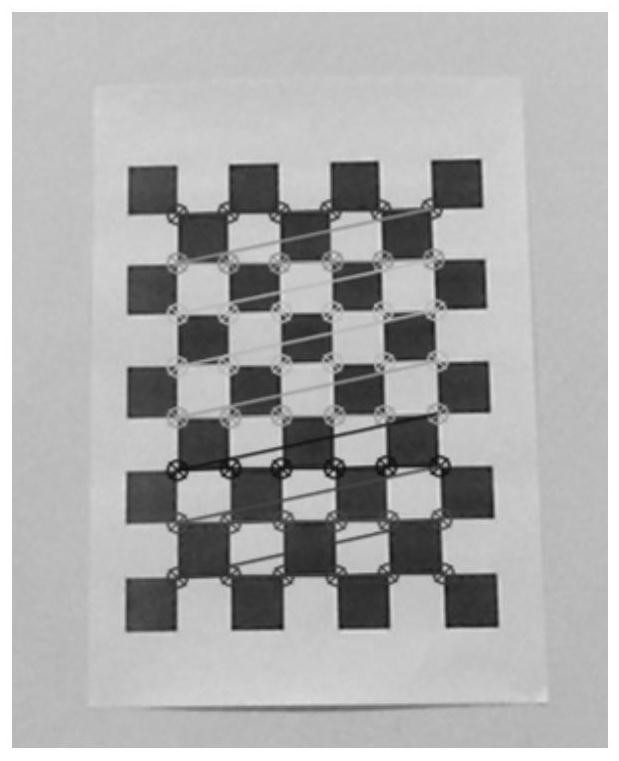
[0055] Step 1. Calibrate the Kinect V2 camera;
[0056] The camera internal parameters determine the accuracy of coordinate transformation when the camera acquires data, and the distortion parameters can calibrate the radial distortion caused by the lens and the tangential distortion caused by the camera assembly error. In addition, there is a positional offset be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More