Fish-like propelling robot with prior stability
An underwater robot and stability technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increasing resistance, shaking, and energy consumption, and achieve the effects of reducing resistance, increasing frequency, and reducing resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
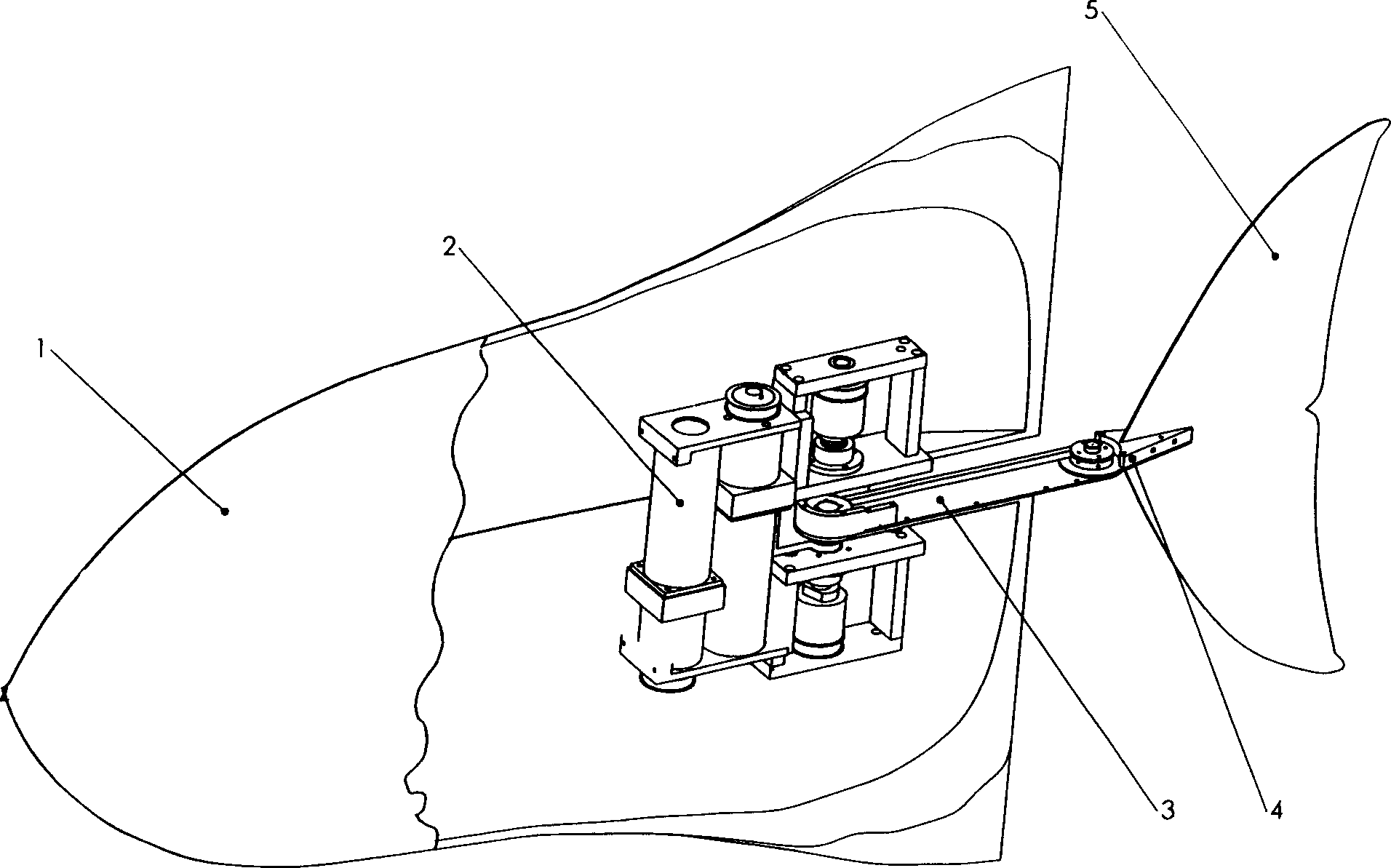
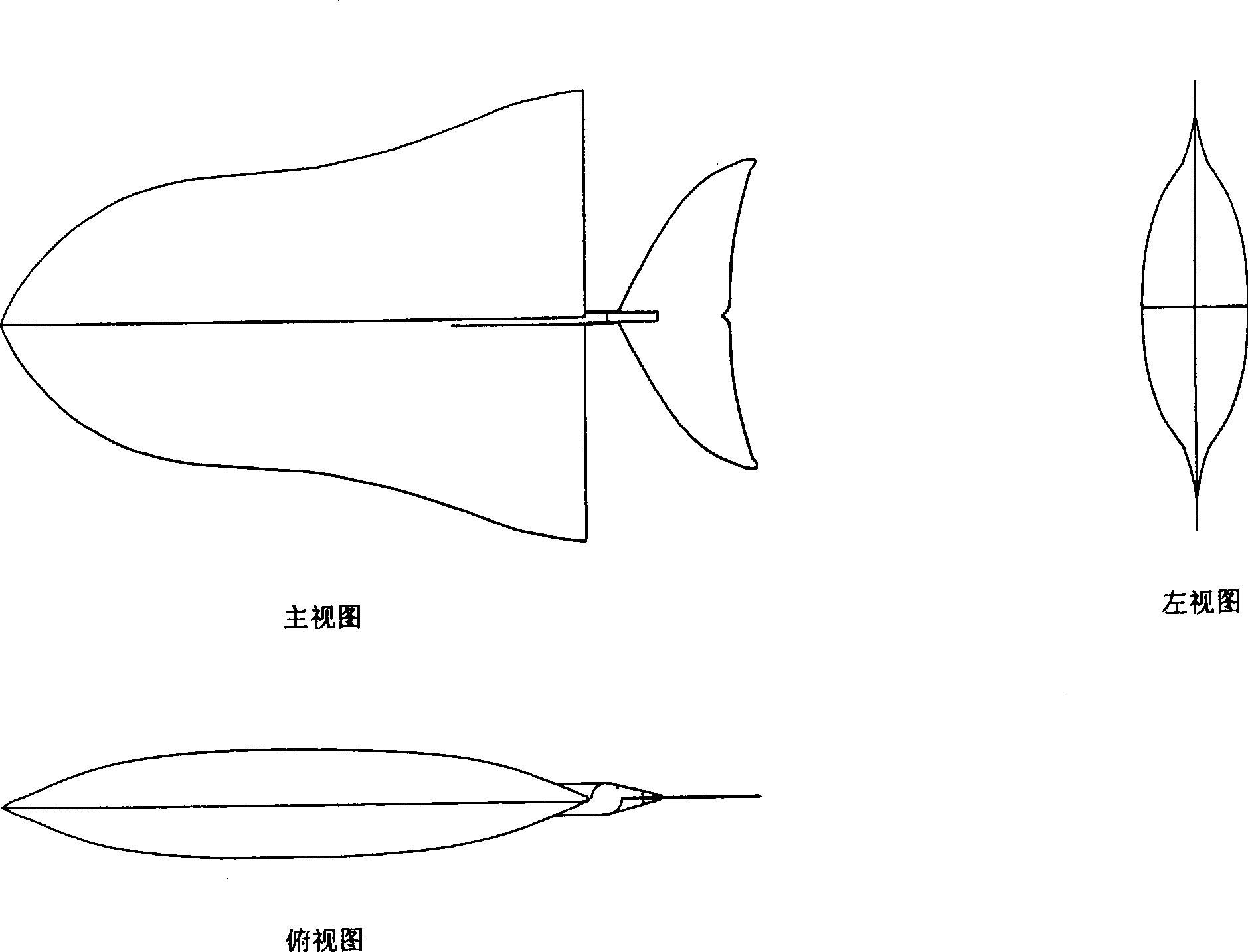
[0027] See figure 1 , 3 As shown, a kind of fish-like propulsion underwater robot with priority of stability in the present invention is composed of five parts of fish body 1, propulsion device 2, big arm 3, tail handle 4 and caudal fin 5, and propulsion device 2 is placed on the Inside the fish body shell 1 , the big arm 3 , tail peduncle 4 and caudal fin 5 are placed outside the fish body shell 1 . The fish body shell 1 maintains the high-stability hydrodynamic shape of the SPC, and the SPC propulsion part is composed of a propulsion device 2 , a boom 3 , a tail shank 4 and a tail fin 5 . The SPC propelling part can generate relative motion under the drive of the servo motor, and the caudal fin 5 at the working end can generate motion according to the control law of the SPC.
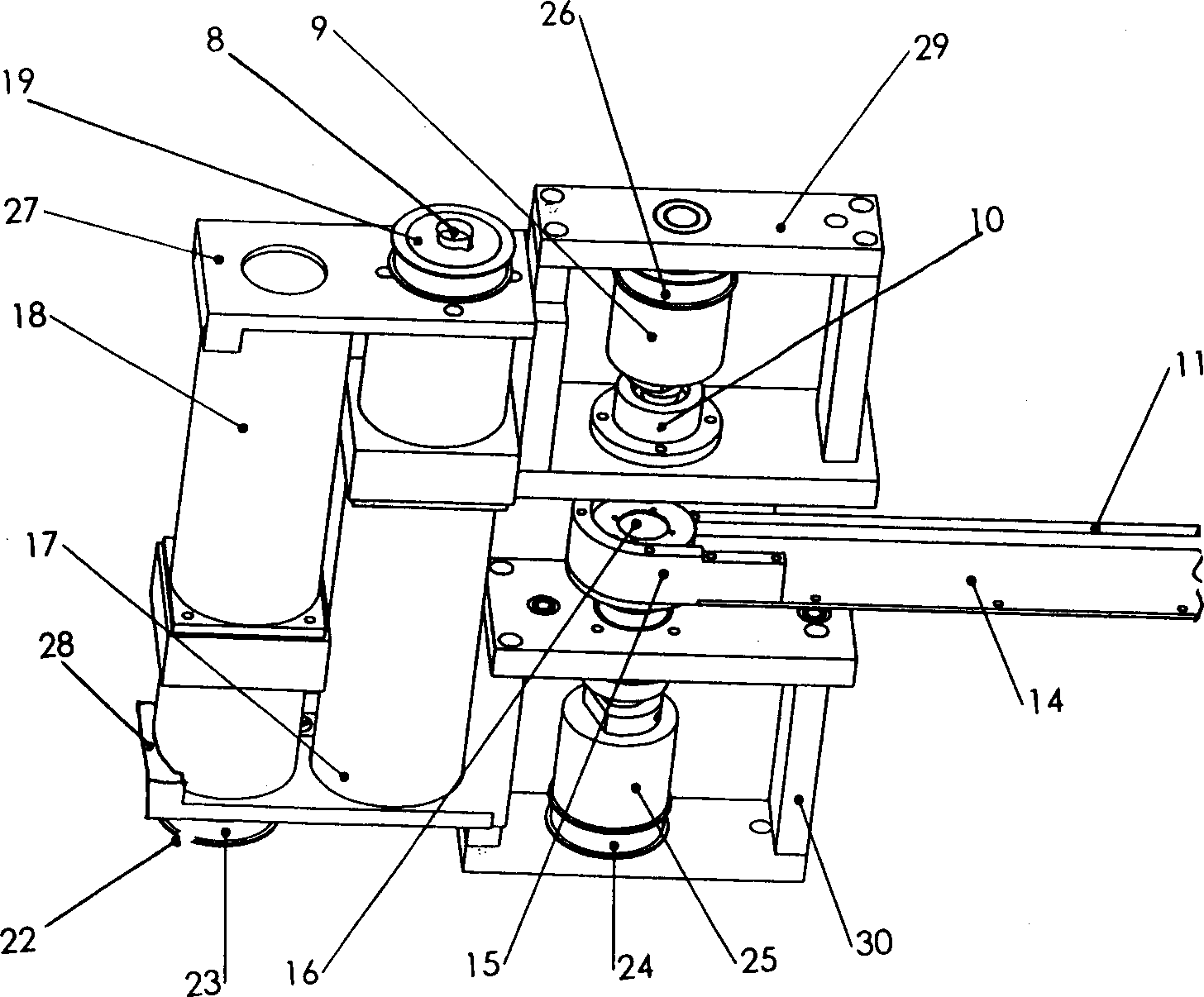
[0028] The SPC kinematics structure of the present invention has two deg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com