Under water-robot control device using distributed node network
A technology of underwater robots and distributed nodes, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc. It can solve the problems that cannot meet the needs of the development of underwater robot control systems, it is difficult to add equipment or sensors, and the system has poor scalability, etc. problems, to achieve the effect of reducing the probability of water leakage and line failure, good software versatility, and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
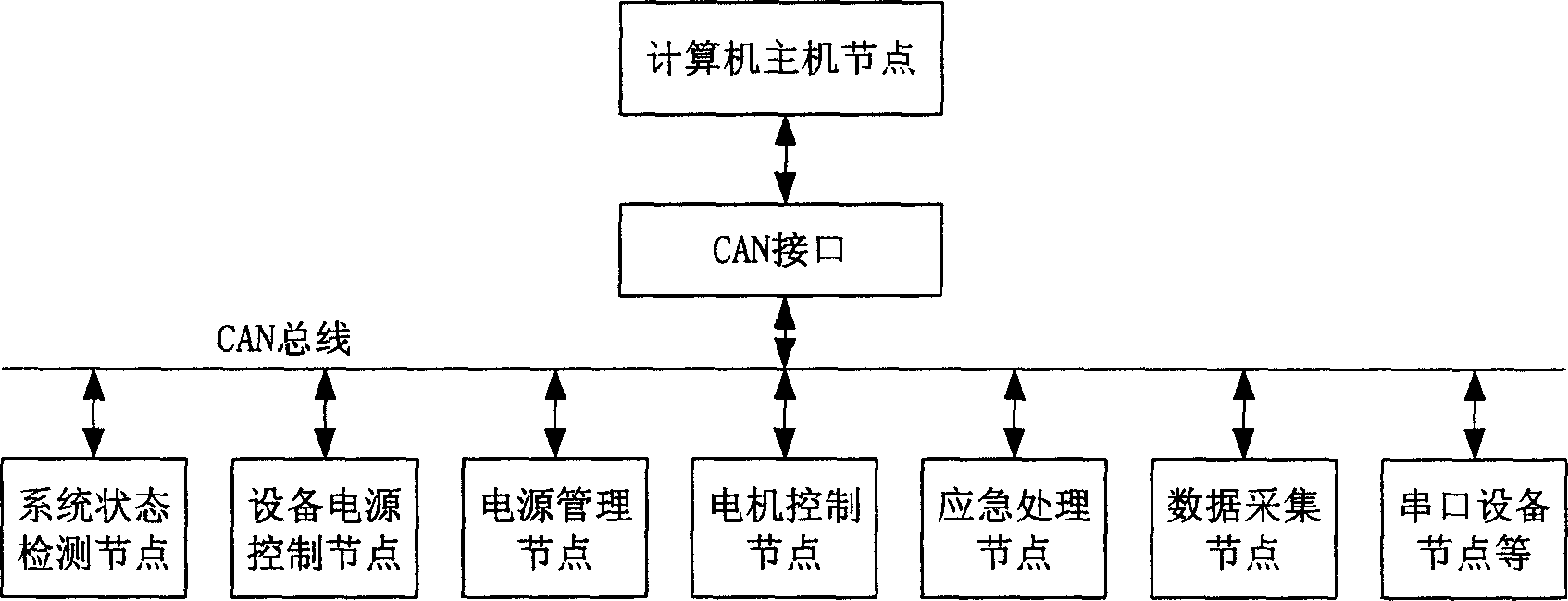
[0032] The present invention adopts the CAN network as the core of the distributed control, and the hardware is composed of a CAN network node composed of a computer host node and a plurality of single-chip microcomputers, wherein the computer host node includes a computer host and a CAN interface, and the CAN network node mainly includes a system state detection node, a device Power control nodes, power management nodes, motor control nodes, emergency processing nodes, data acquisition nodes, serial device nodes; computer host nodes and all CAN network nodes are connected together through the CAN interface to form a CAN network; the software consists of computer host program It is composed of the single-chip computer program of each CAN network node, and its program includes CAN interface driver, each CAN network node driver, and CAN user inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com