

Gasture estimation and interfusion method based on strapdown inertial nevigation system
A strapdown inertial navigation and attitude estimation technology, applied in the navigation field of strapdown inertial navigation system, can solve the problems of reduced system reliability, increased system cost, inability to use external information sources, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
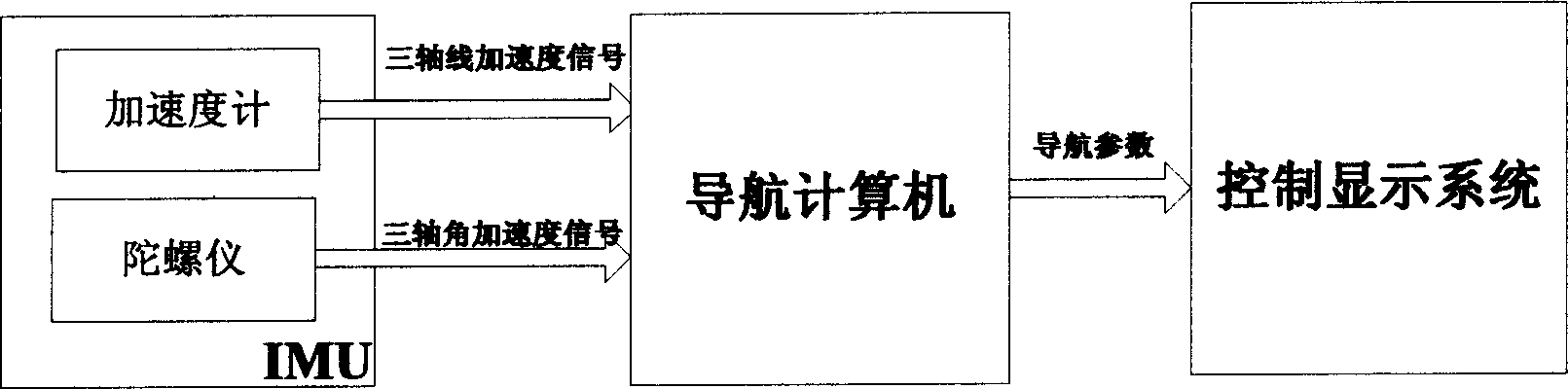
[0091] The hardware composition of the strapdown inertial navigation system in this embodiment is the same as that of the traditional strapdown inertial navigation system. Such as Figure 5 As shown, this embodiment includes the following steps:
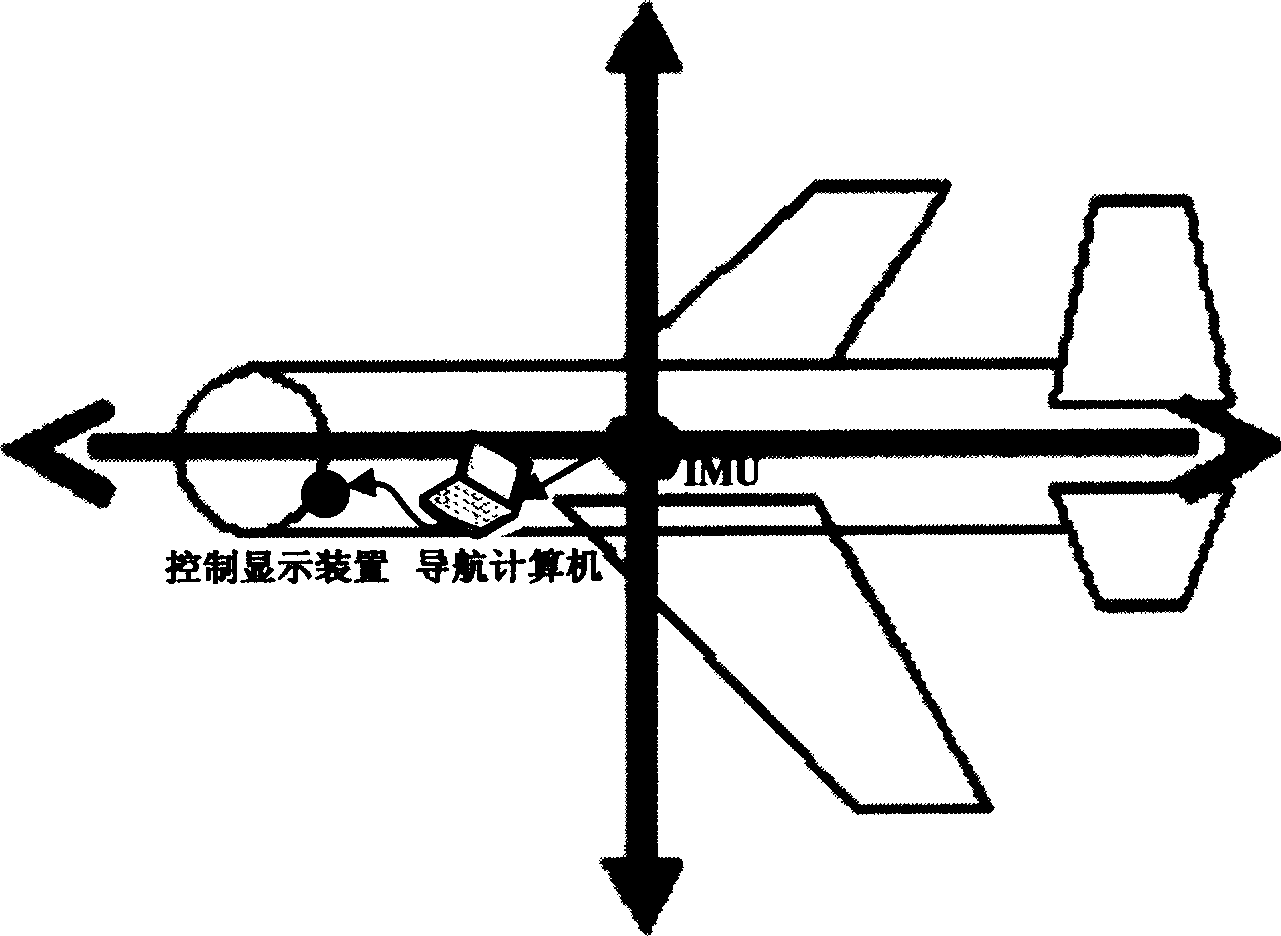
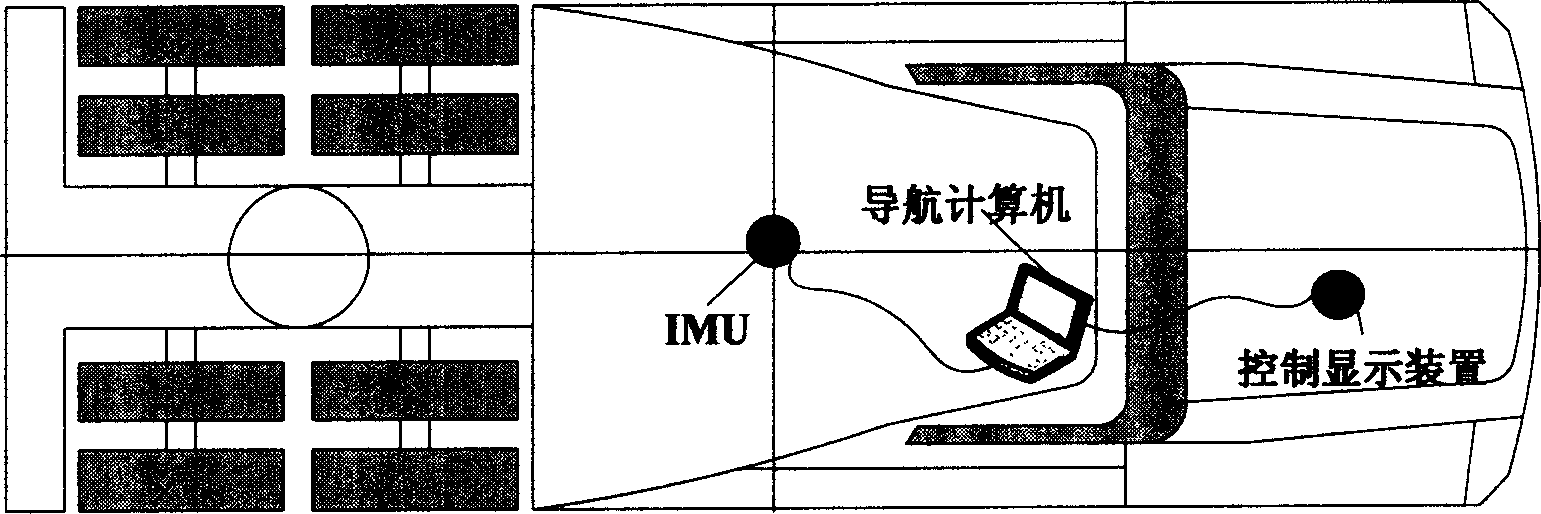
[0092] (1) Use the sensor in the six-degree-of-freedom inertial measurement unit (IMU for short) to sense the movement of the carrier: the IMU senses the angular velocity signal of the moving carrier along its axis through the gyroscope, and measures the linear acceleration signal along the axis of the carrier through the accelerometer, and transmit the signal to the navigation computer;
[0093] (2) Strapdown inertia calculation: the navigation computer calculates the attitude of the angular velocity signal sensitive to the gyroscope, and performs trigonometric function calculation on the attitude matrix to extract the attitude angle and azimuth angle of the carrier. The acceleration measured by the accelerometer is calculated by ...
Embodiment 2
[0158] Embodiment two: the step in the present embodiment is basically the same as the step in the embodiment, and the difference is that the basic conditions that the system attitude estimation method is set in the step (4) are:
[0159]
[0160] where f bx f by f bz Indicates the output value of the three-axis accelerometer; f nz Indicates the vertical acceleration of the system in the geographic coordinate system, X 1 x 2 Y 1 Y 2 Respectively denote the thresholds for the pose estimates used by the system.
Embodiment 3
[0162] When the system has other external navigation information sources, such as GPS, odometer, atmospheric velocity computer or magnetic heading sensor, the system can still use the attitude estimation value of the accelerometer to further improve the system attitude accuracy. The basic steps are the same as in Embodiment 1. Basically the same, the difference is that in this embodiment, the system can perform data fusion with one or more external navigation information, so as to further improve the accuracy of the system to meet the requirements of more application occasions. When the strapdown inertial navigation system is assisted by external navigation information, it is usually called an integrated navigation system. The attitude estimation method of the accelerometer of the present invention can also be applied in the integrated navigation system, and its system software flow chart is as follows Figure 14 shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More