

Method for correcting navigation positioning data
A technology of navigation positioning and correction methods, which is applied in the field of navigation systems, can solve problems such as immaturity and systematization, weak adaptability to complex working environments, and relatively subjective factors in information description, so as to improve quality and real-time processing Ability to judge the effect of reliable results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
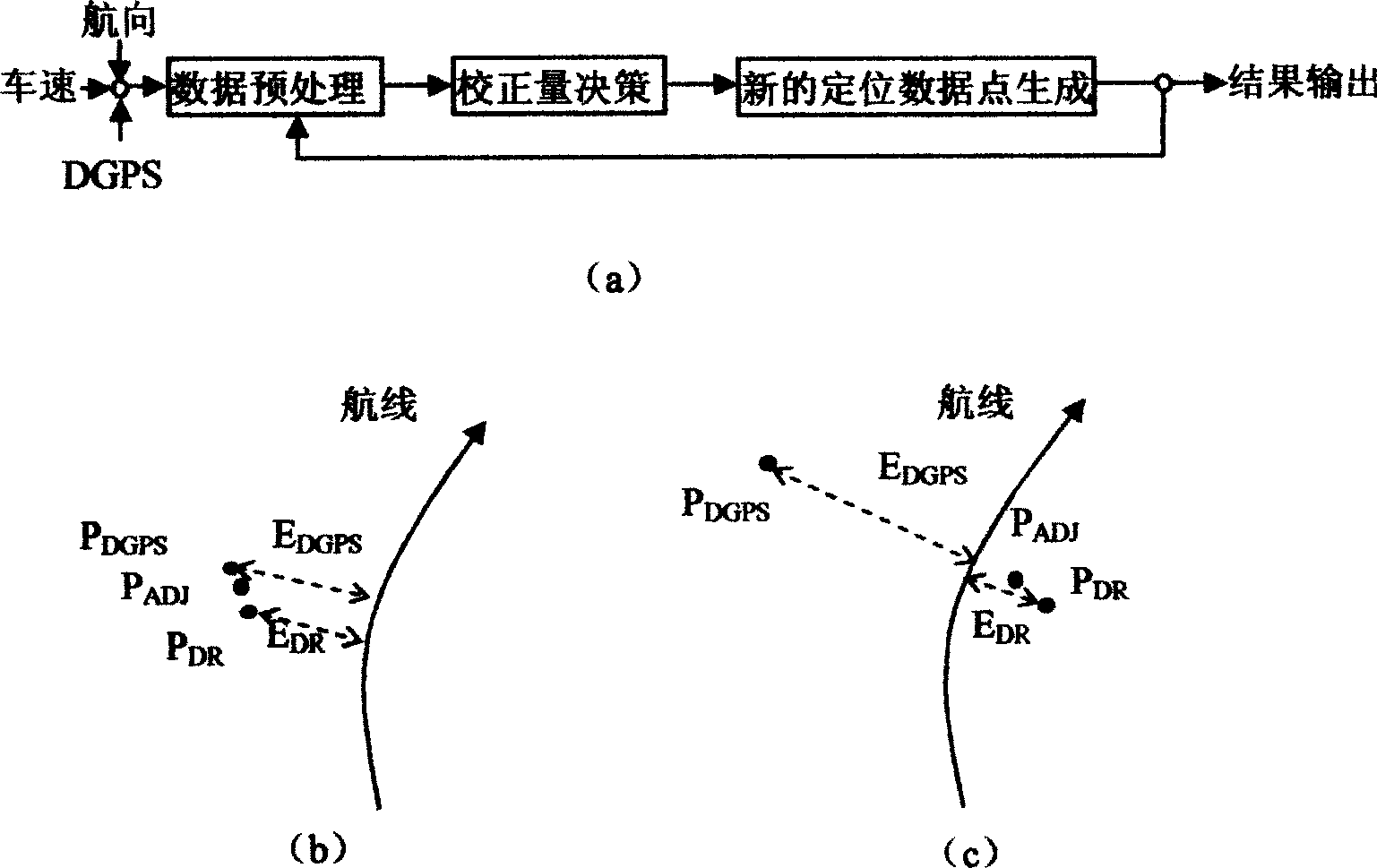
[0027] figure 1 It is a schematic diagram of the principle of the embodiment when correcting the input of two positioning data points obtained by DGPS and DR. In this embodiment, the main parameters of the projected coordinate system used for electronic map registration are:
[0028] (1) Projection method: Gauss-Kruger
[0029] (2) Central meridian: 114.000000 (3 degree belt)
[0030] (3) Horizontal offset: 500km
[0031](4) Geographic coordinate system: GCS_WGS_1984
[0032] (5) Geodetic reference system: D_WGS_1984
[0033] (6) Reference ellipsoid: WGS_1984
[0034] (7) Major axis of ellipsoid: 6378137m
[0035] (8) Ellipsoid oblateness: 0.0033528107.
[0036] figure 1 a for figure 1 A schematic diagram of the process of performing the correction process in the illustrated embodiment. In an ideal state, DGPS and DR positioning data point P DGPS ,P DR are coincident together, but due to the existence of errors, these two positioning data points usually do not c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More