

Automatic optimizing desing method for end pick up
A technology of automatic optimization and design method, applied in the fields of instruments, calculations, special data processing applications, etc., can solve the problems of long installation and debugging time, large insurance factor, and inability to carry out accurate design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0081] Embodiment 1, realization system adopts VB to carry out secondary development on the basis of CATIA V5 R14 CAD software, after starting the software developed with VB, system automatically starts CATIA software, then carries out according to aforementioned design steps:
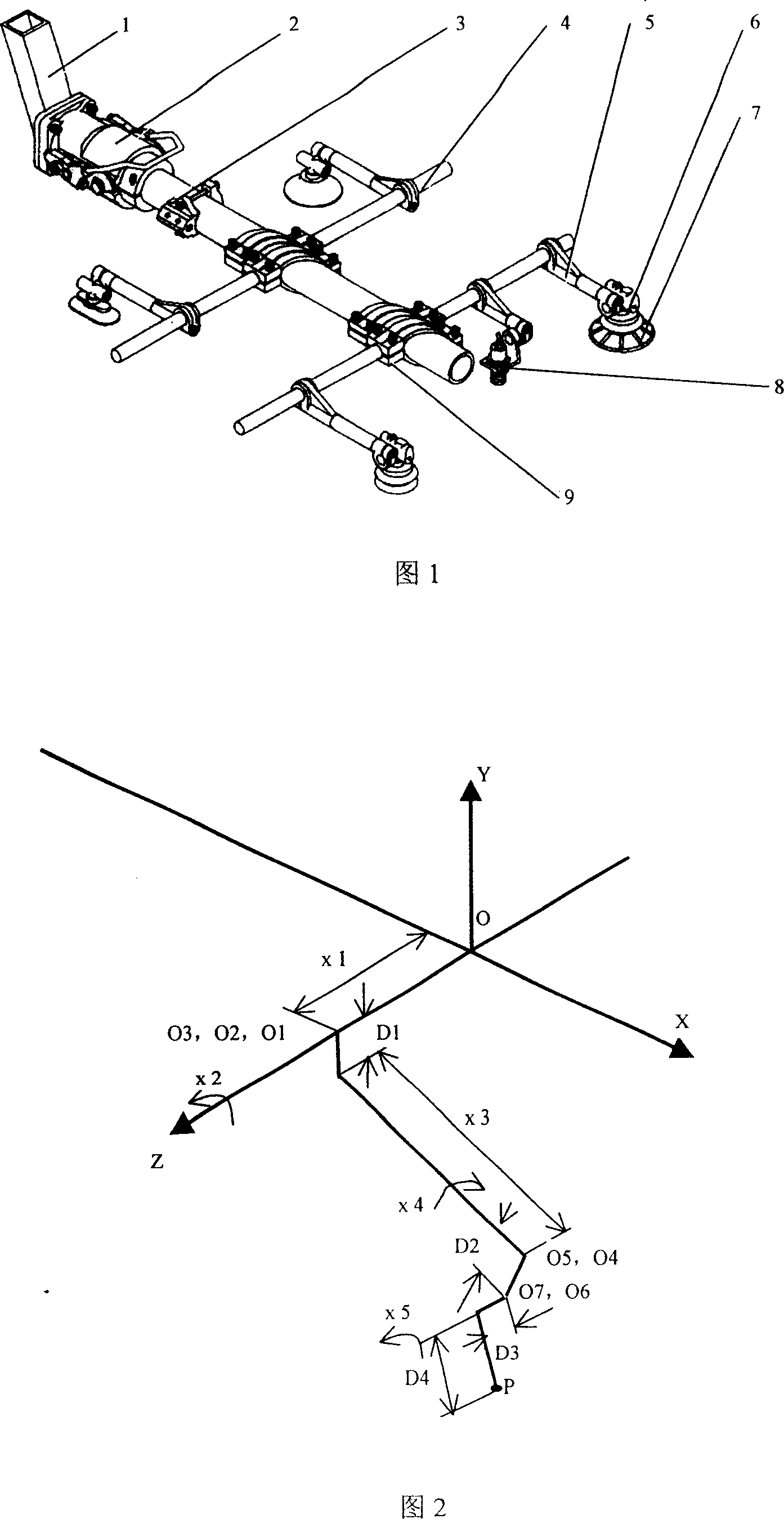
[0082] 1. Import the 3D models of the press, manipulator, mold and stamping parts into CATIA, and the positional relationship between the parts is determined in advance before the mold design;
[0083] 2. The initial position of the manipulator is determined in advance. If it needs to be adjusted, the manipulator can be moved in CATIA through the buttons provided by the software, and the manipulator can be adjusted to a suitable position;
[0084] 3. The designer selects the brand of the standard part of the end picker, and then selects the main rod of the appropriate model for installation, and the system automatically installs the main rod on the manipulator;
[0085] 4. Determine the point where the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More