

AC servo system with distribution type motion controller
A motion control and distributed technology, applied in the field of AC servo system, can solve problems such as complex wiring, susceptibility to noise interference, and limited command signals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Preferred embodiments of the present invention will be described below with reference to the accompanying drawings.
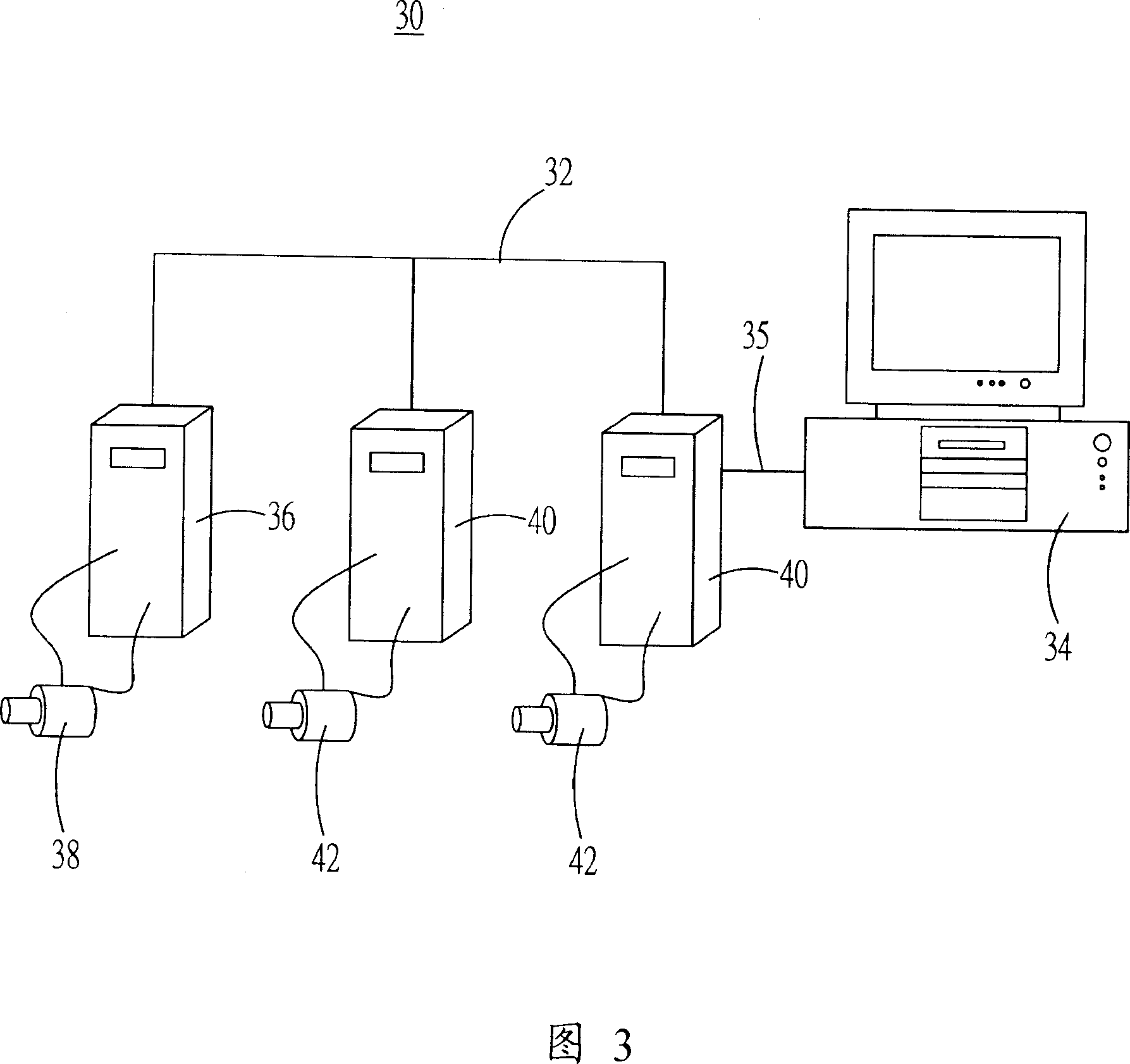
[0035] FIG. 3 is a structural diagram of an AC servo system with distributed multi-axis motion control according to the present invention. In FIG. 3 , a distributed multi-axis motion control system 30 is used for multi-axis control. The system has a communication network 32, a spindle driver 36 is coupled to the communication network 32, a spindle motor 38 is coupled to the spindle driver 36, and multiple slaves The shaft driver 40 is coupled to the communication network 32 , a plurality of slave shaft motors 42 are coupled to the slave shaft driver 40 , and a personal computer or man-machine interface 34 is coupled to any shaft driver via a transmission line 35 . Wherein, the communication network 32 is composed of a CAN bus, and the main shaft motor 38 and the slave shaft motor 42 are AC servo motors.
[0036] The written software control program and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More