

Movement control method, movement manipulation apparatus, and method for manipulating movement of moving body
a technology of movement control and movement apparatus, applied in adaptive control, computer control, instruments, etc., can solve the problems of difficult to read words, difficult to perform work quickly and reliably, and pose safety problems, and achieve the effect of reducing cost, ensuring safety and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
embodiment 1
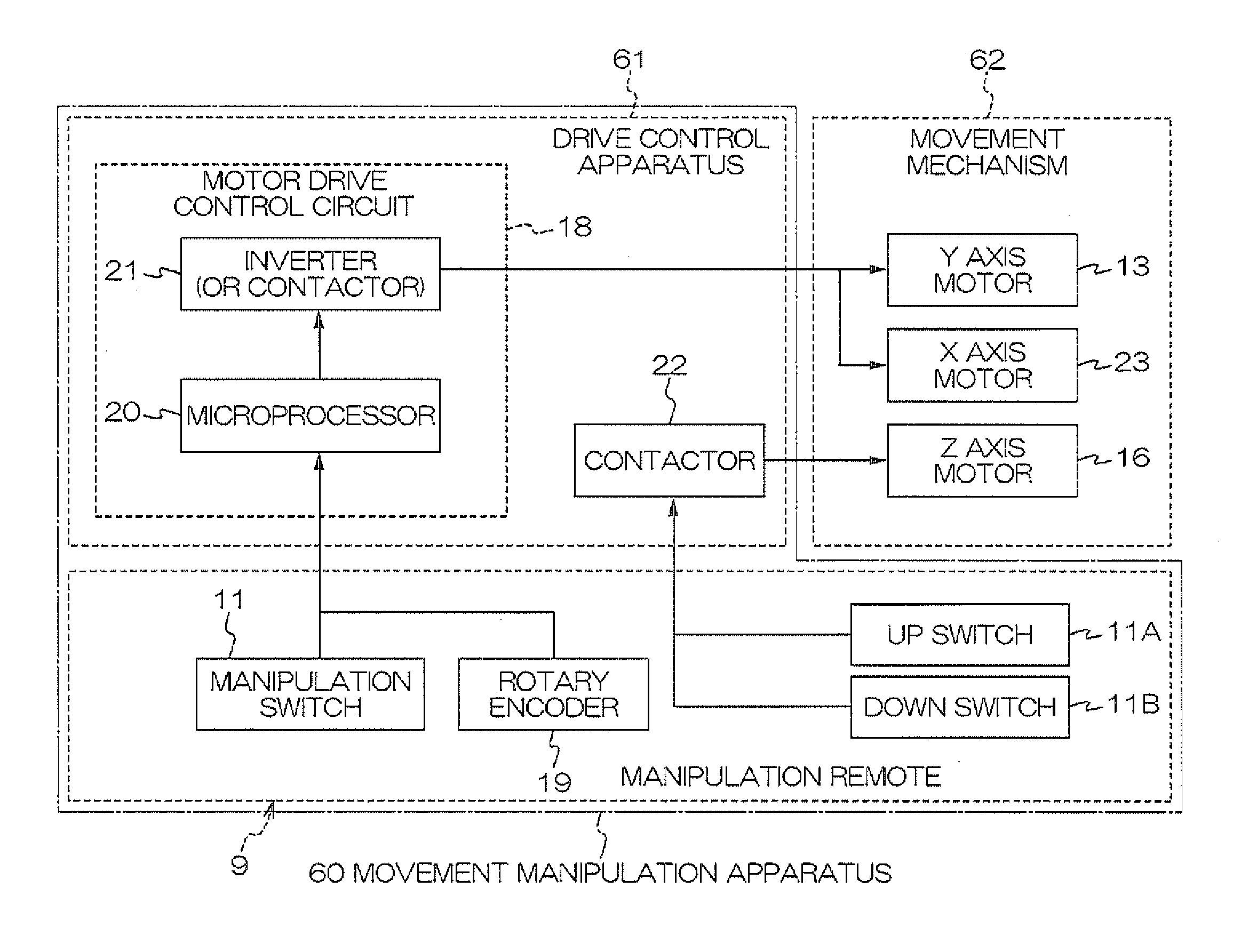
[0177]First, the three-dimensional movement apparatus pertaining to Embodiment 1 of the presently disclosed subject matter will be described through reference to FIGS. 1 to 4.
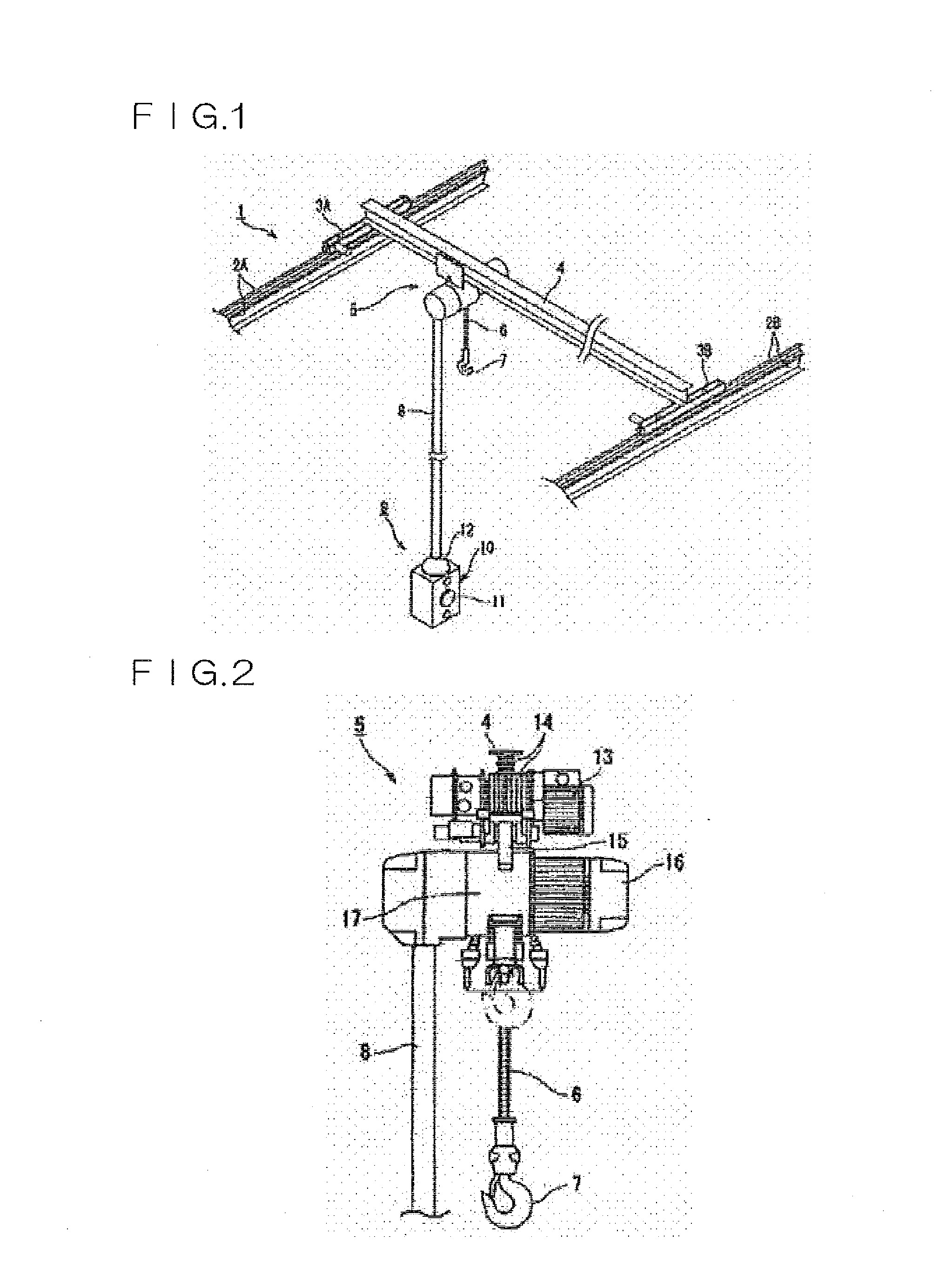
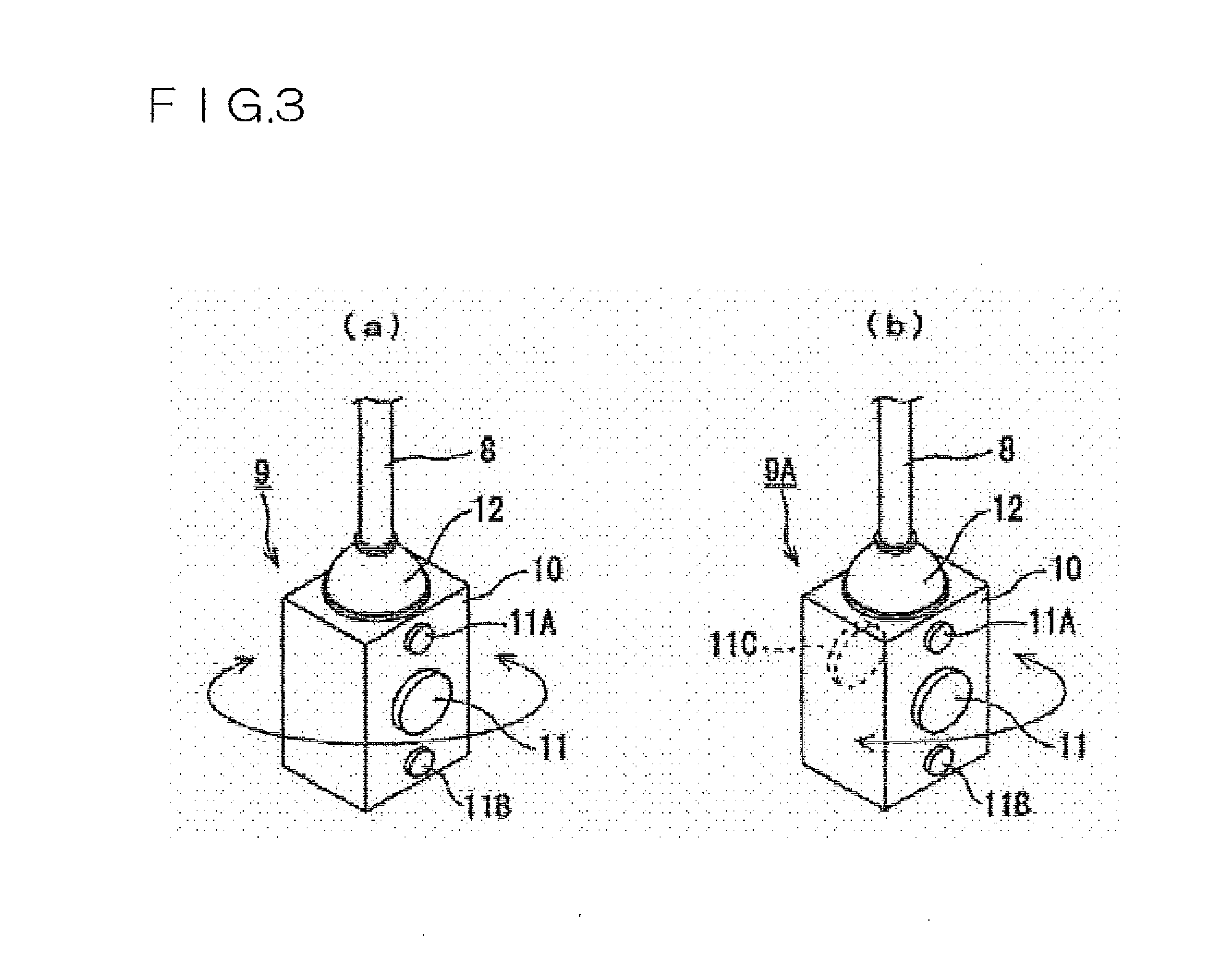
[0178]FIG. 1 is an oblique view of the overall configuration of an overhead crane, which is an example of the three-dimensional movement apparatus pertaining to Embodiment 1 of the presently disclosed subject matter. FIG. 2 is a diagram of the structure of a lifting device of an overhead crane, which is an example of the three-dimensional movement apparatus pertaining to Embodiment 1 of the presently disclosed subject matter. FIG. 3(a) is an oblique view of the remote casing portion of a manipulation remote in a three-dimensional movement apparatus pertaining to Embodiment 1 of the presently disclosed subject matter, and FIG. 3(b) is an oblique view of the remote casing portion of a manipulation remote in a three-dimensional movement apparatus pertaining to a modification of Embodiment 1 of the presently disclo...
embodiment 2
[0210]Next, an overhead crane will be described through reference to FIGS. 5 and 6, as an example of a three-dimensional movement apparatus pertaining to Embodiment 2 of the presently disclosed subject matter.
[0211]FIG. 5 is an oblique view of the overall configuration of an overhead crane, which is an example of the three-dimensional movement apparatus pertaining to Embodiment 2 of the presently disclosed subject matter.
[0212]FIG. 6 is an oblique view of the manipulation remote in the three-dimensional movement apparatus pertaining to Embodiment 2 of the presently disclosed subject matter.
[0213]The overhead crane 1A pertaining to Embodiment 2 of the presently disclosed subject matter has the same external appearance as the overhead crane 1 in Embodiment 1 shown in FIG. 1, except for the portion of a manipulation remote 35, so portions that are the same are numbered the same as in FIG. 1 and will not be described in detail again. The constitution of the motor drive control circuit i...
embodiment 3
[0224]An overhead crane will now be described through reference to FIGS. 7 to 9, as an example of the three-dimensional movement apparatus pertaining to Embodiment 3 of the presently disclosed subject matter.
[0225]FIG. 7 is an oblique view of the overall configuration of an overhead crane, which is an example of the three-dimensional movement apparatus pertaining to Embodiment 3 of the presently disclosed subject matter. FIG. 8 is an oblique view of the manipulation remote in the three-dimensional movement apparatus pertaining to Embodiment 3 of the presently disclosed subject matter. FIG. 9 is an oblique view of the manipulation remote in a modification of the three-dimensional movement apparatus pertaining to Embodiment 3 of the presently disclosed subject matter.
[0226]The overhead crane 1B pertaining to Embodiment 3 of the presently disclosed subject matter has the same external appearance as the overhead crane 1 in Embodiment 1 shown in FIG. 1 except for a manipulation remote 40...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More