Image processing device, method and program
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
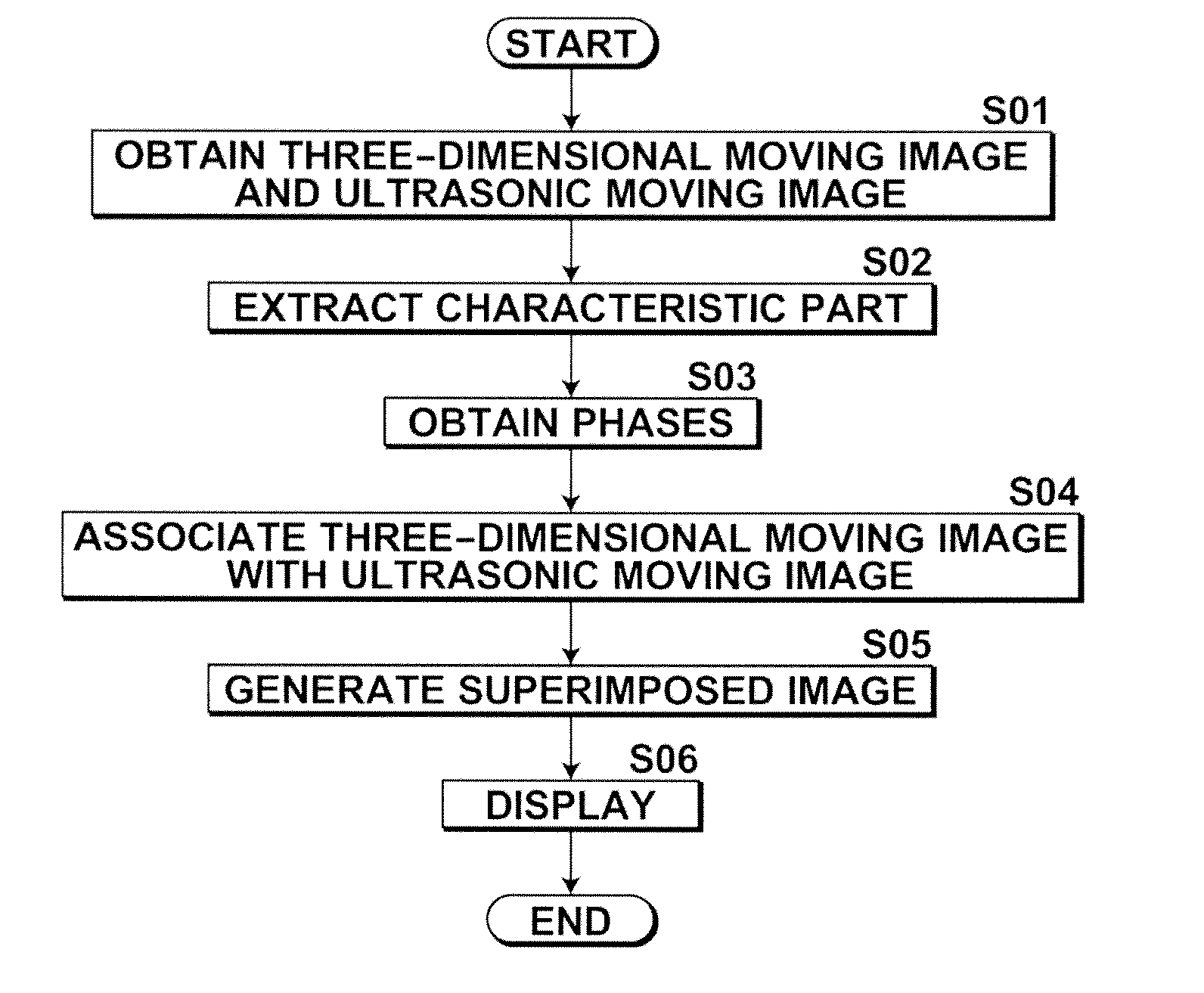
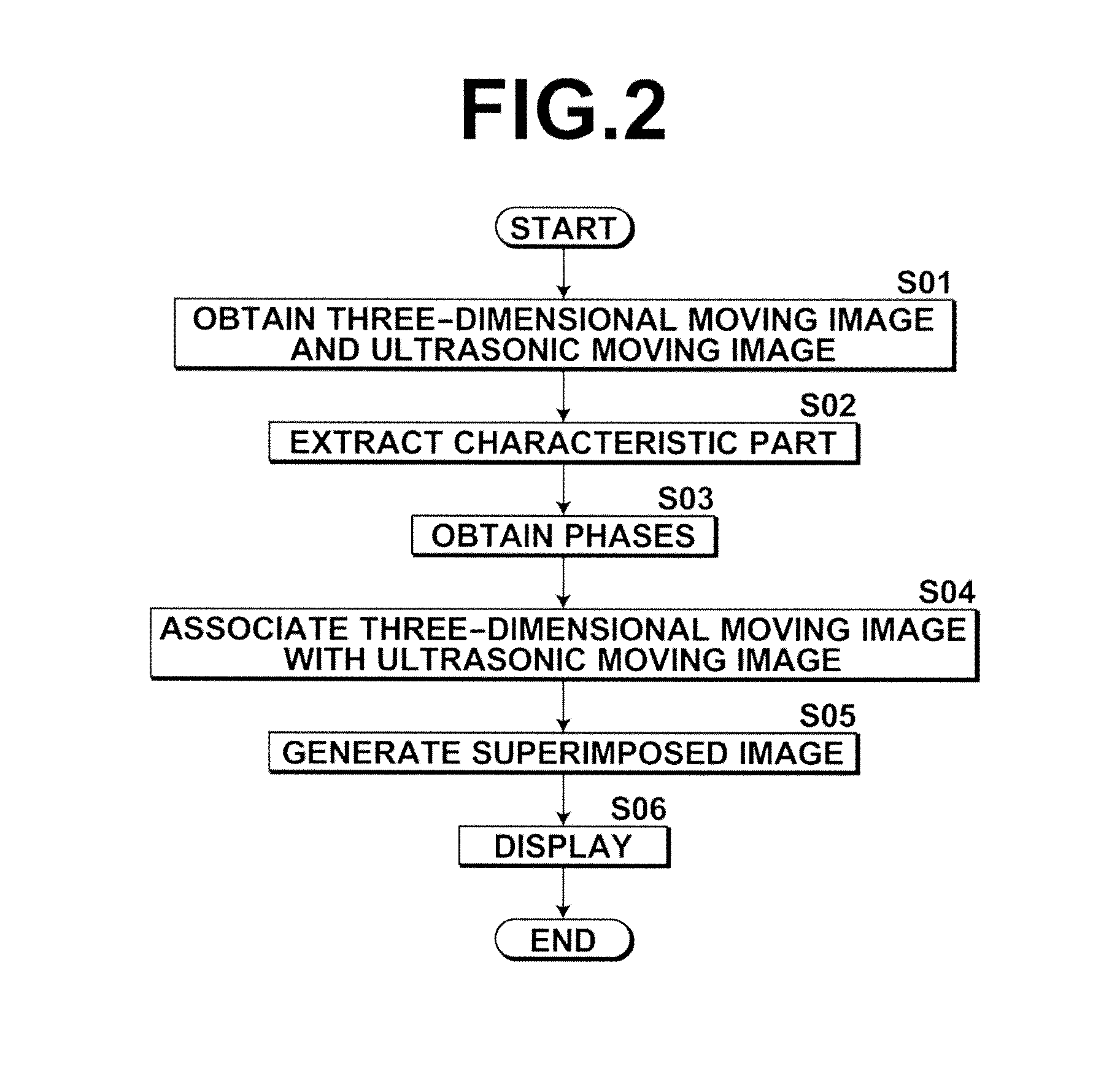
[0027]Hereinafter, embodiments of an image processing device, an image processing program and an image processing method of the present invention will be described in detail with reference to the drawings.
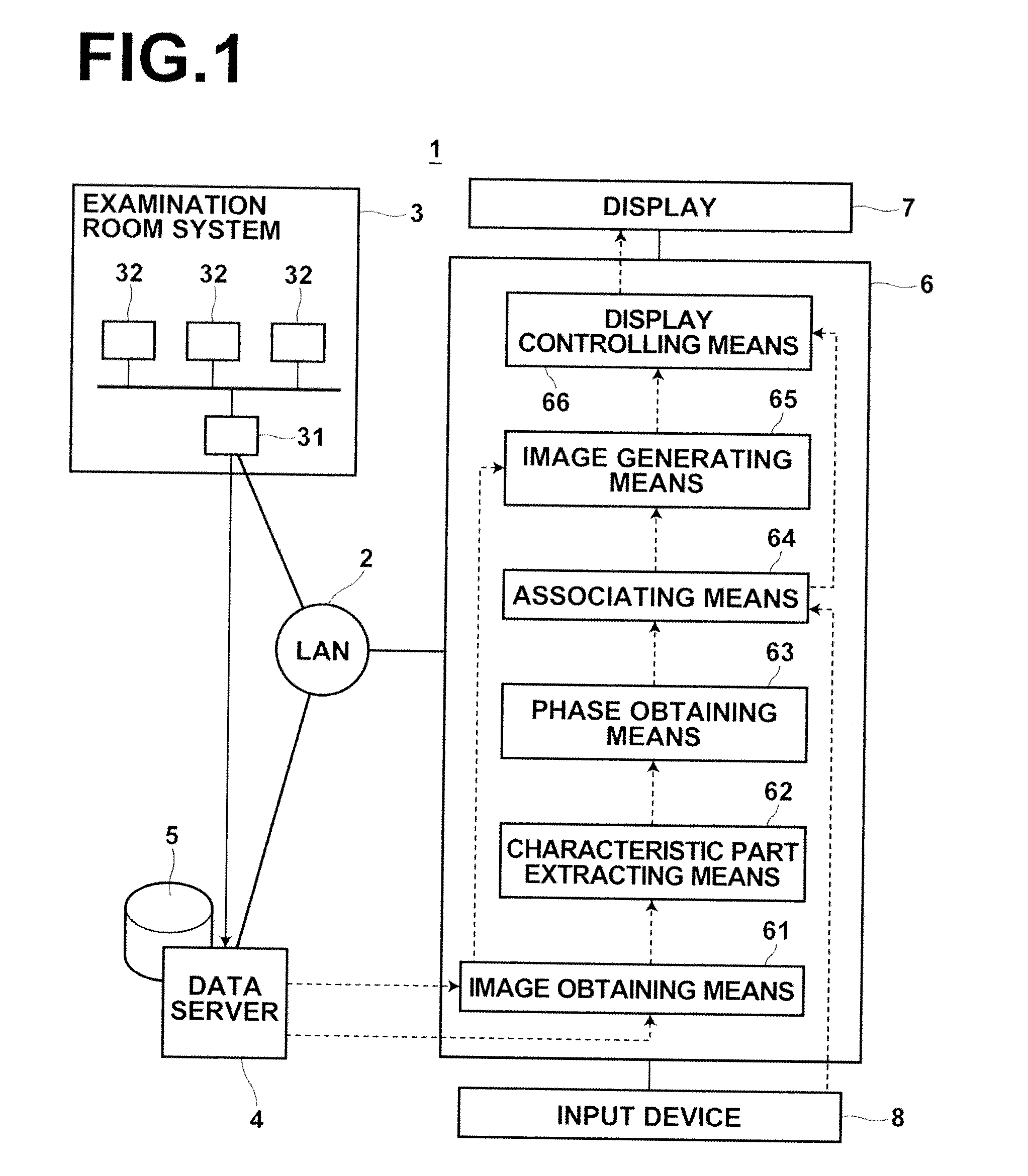
[0028]FIG. 1 illustrates the schematic configuration of a hospital system 1 incorporating an image processing device 6 according to one embodiment of the invention. The hospital system 1 includes an examination room system 3, a data server 4 and a diagnosis workstation (WS) 6, which are connected with each other via a local area network (LAN) 2.
[0029]The examination room system 3 includes various modalities 32 for imaging a subject, and an examination room workstation (WS) 31 used for checking and controlling images outputted from the individual modalities. The modalities 32 in this example includes a CT (Computed Tomography) apparatus and an MRI (Magnetic Resonance Imaging) apparatus, which are able to obtain a shape image representing shape information of the heart, and also incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



