

Surgical plan options for robotic machining
a robotic and surgical option technology, applied in the field of surgical options for navigated and/or robotic bone machining, can solve the problems of manual surgery difficulty or even impossible for surgeons, robot failure at any point during surgery, and difficulty in using conventional instruments to finish surgery with non-planar cuts at this point, etc., to achieve the effect of improving accuracy, reproducibility and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
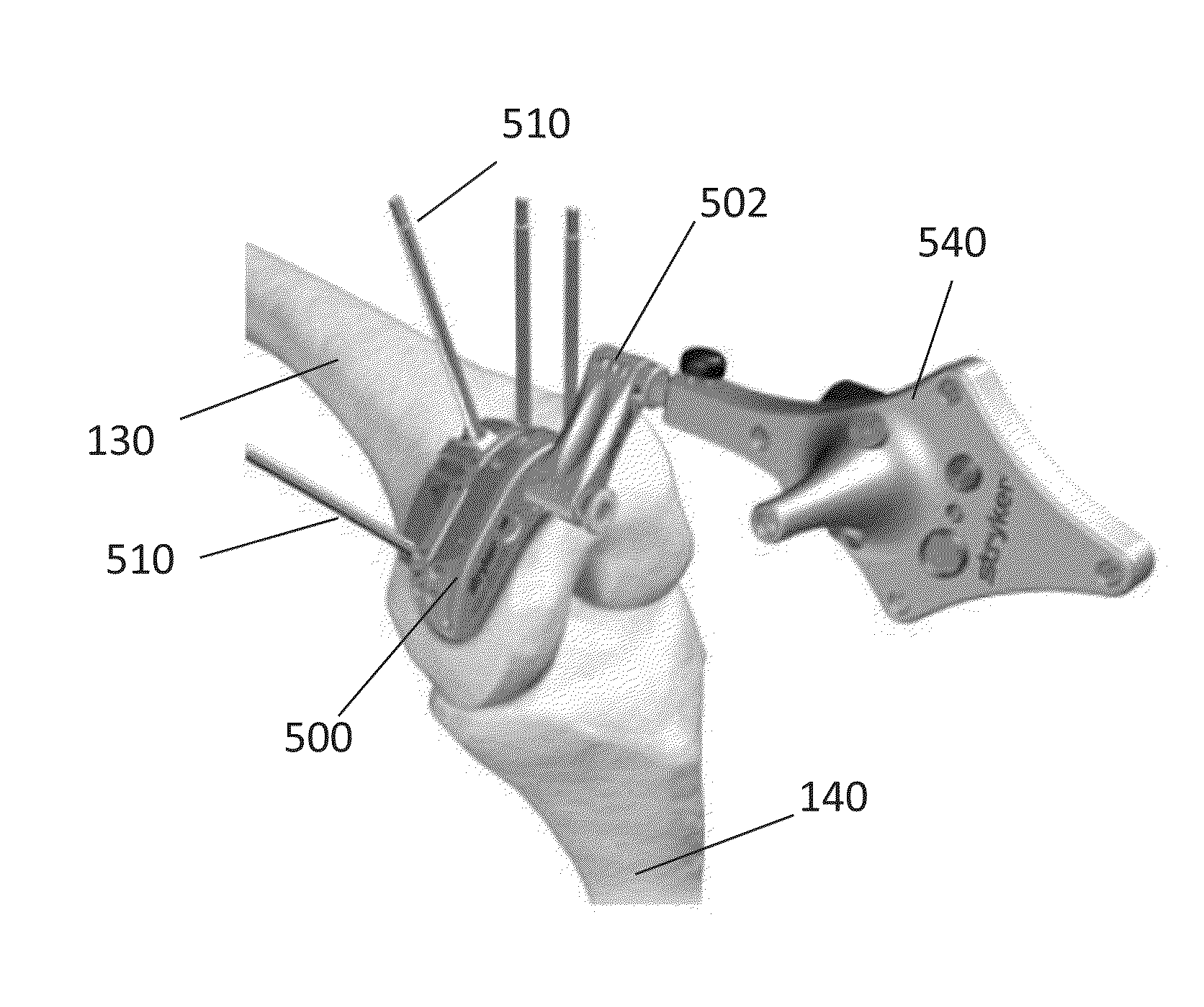
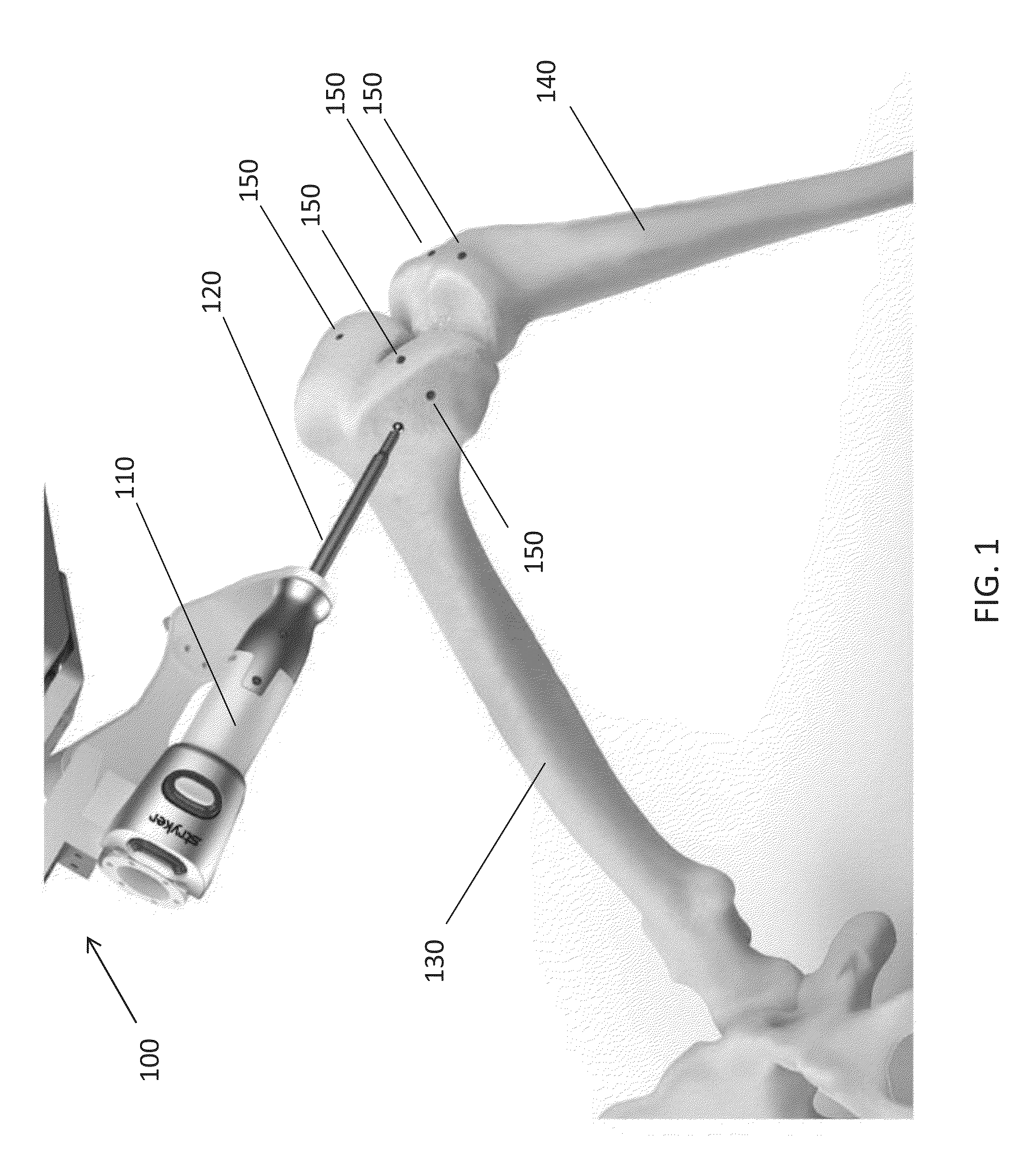
[0045]As used herein, the term “distal” means more distant from the heart and the term “proximal” means closer to the heart. The term “inferior” means toward the feet and the term “superior” means towards the head. The term “anterior” means towards the front part of the body or the face and the term “posterior” means towards the back of the body. The term “medial” means toward the midline of the body and the term “lateral” means away from the midline of the body. Terms including “debulking,”“resecting,”“machining,”“finishing,” and “bone preparation,” are used interchangeably herein, and all generally refer to the removal and / or reshaping of bone.
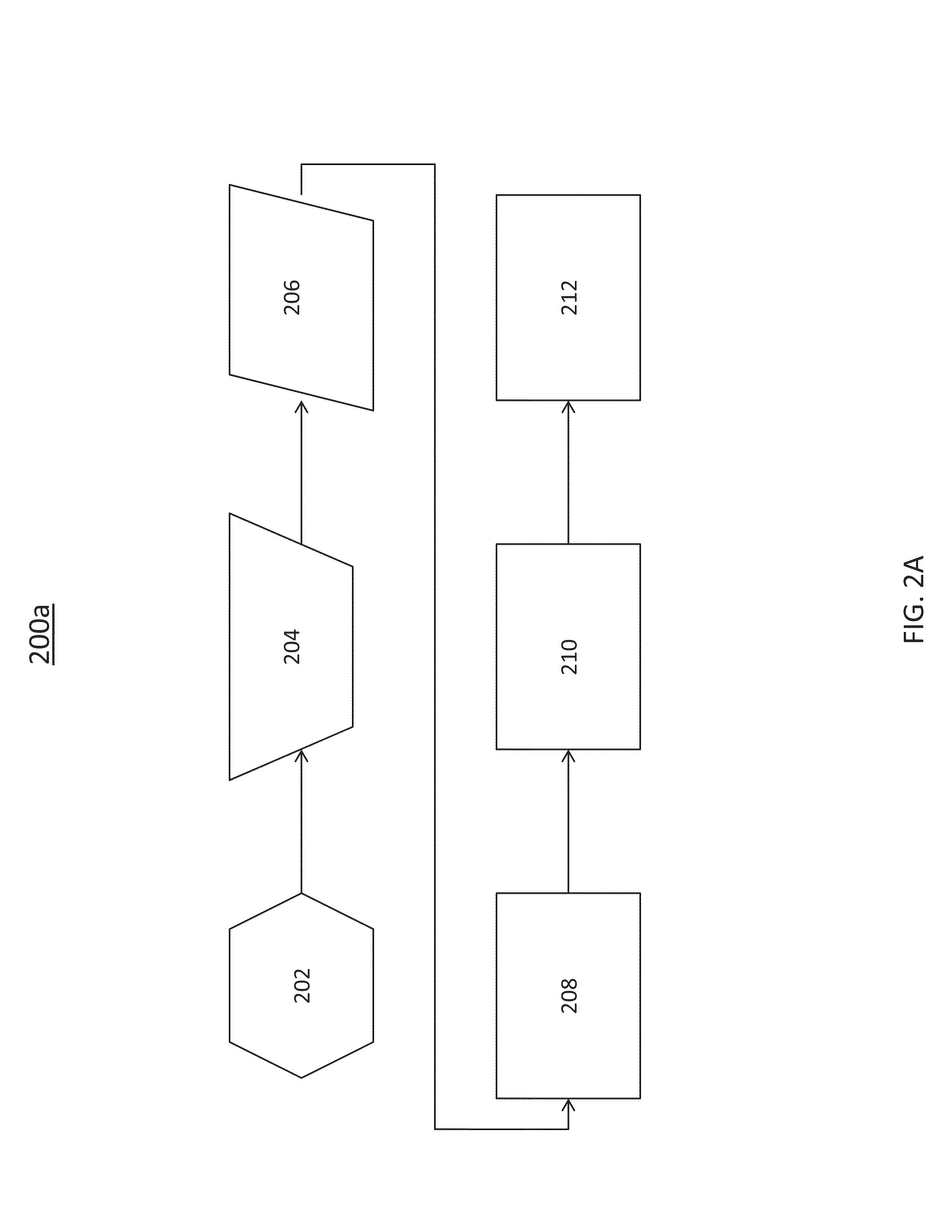
[0046]In the figures, with particular reference to the flow charts contained therein, a step enclosed in a hexagon indicates a tool-change step, a step enclosed in a trapezoid indicates a knee-positioning step, a step in a parallelogram indicates a registration step, a step enclosed in a diamond may indicate a step which branches into multip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More