

Hybrid driven under-water self-navigation device
A hybrid drive and aircraft technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve short, generally several kilometers to hundreds of kilometers, and the maximum is not more than 1000 kilometers, which cannot be realized. and positioning control difficulties to achieve the effect of improving gliding efficiency and accurate and fast monitoring
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
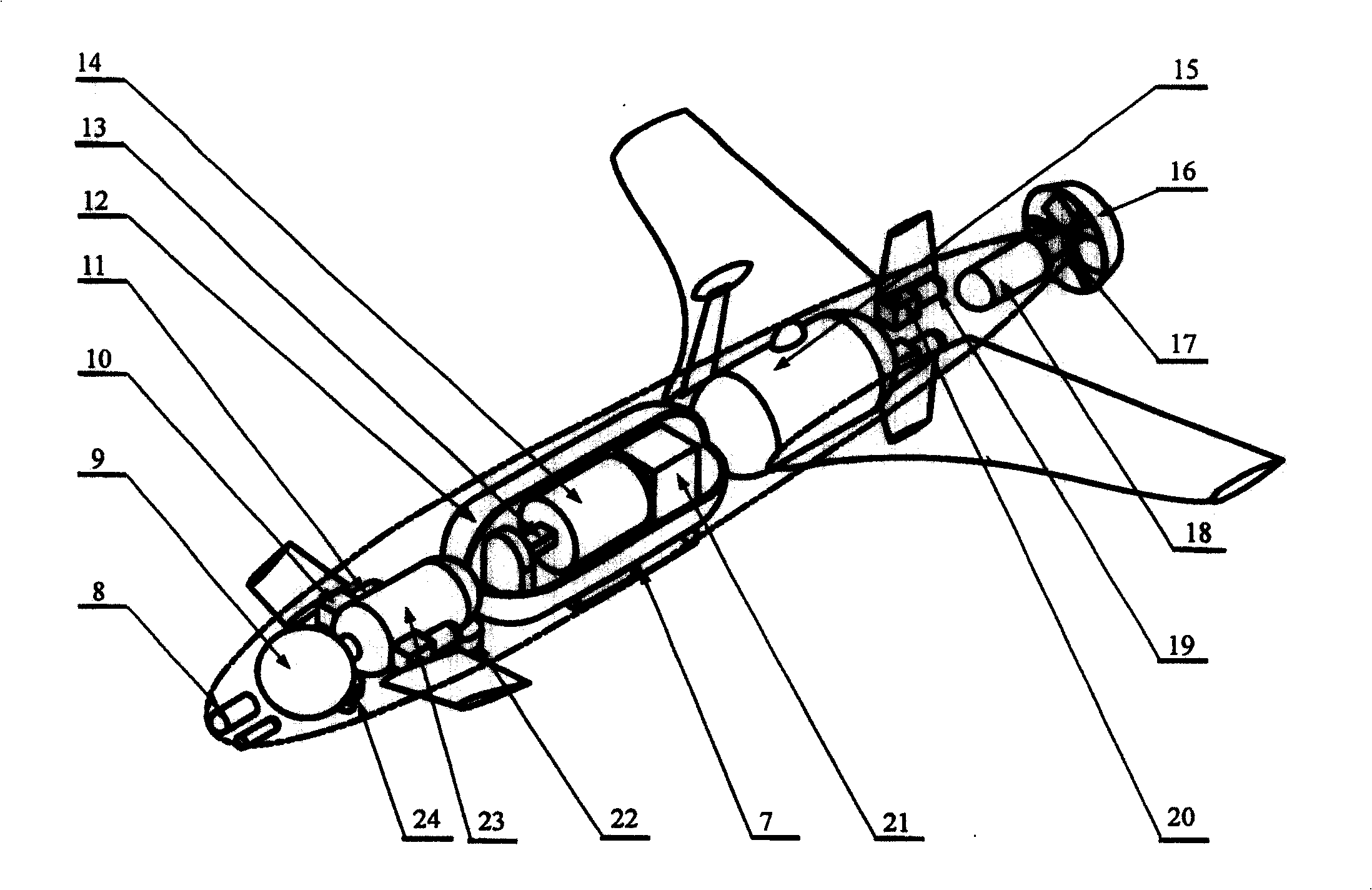
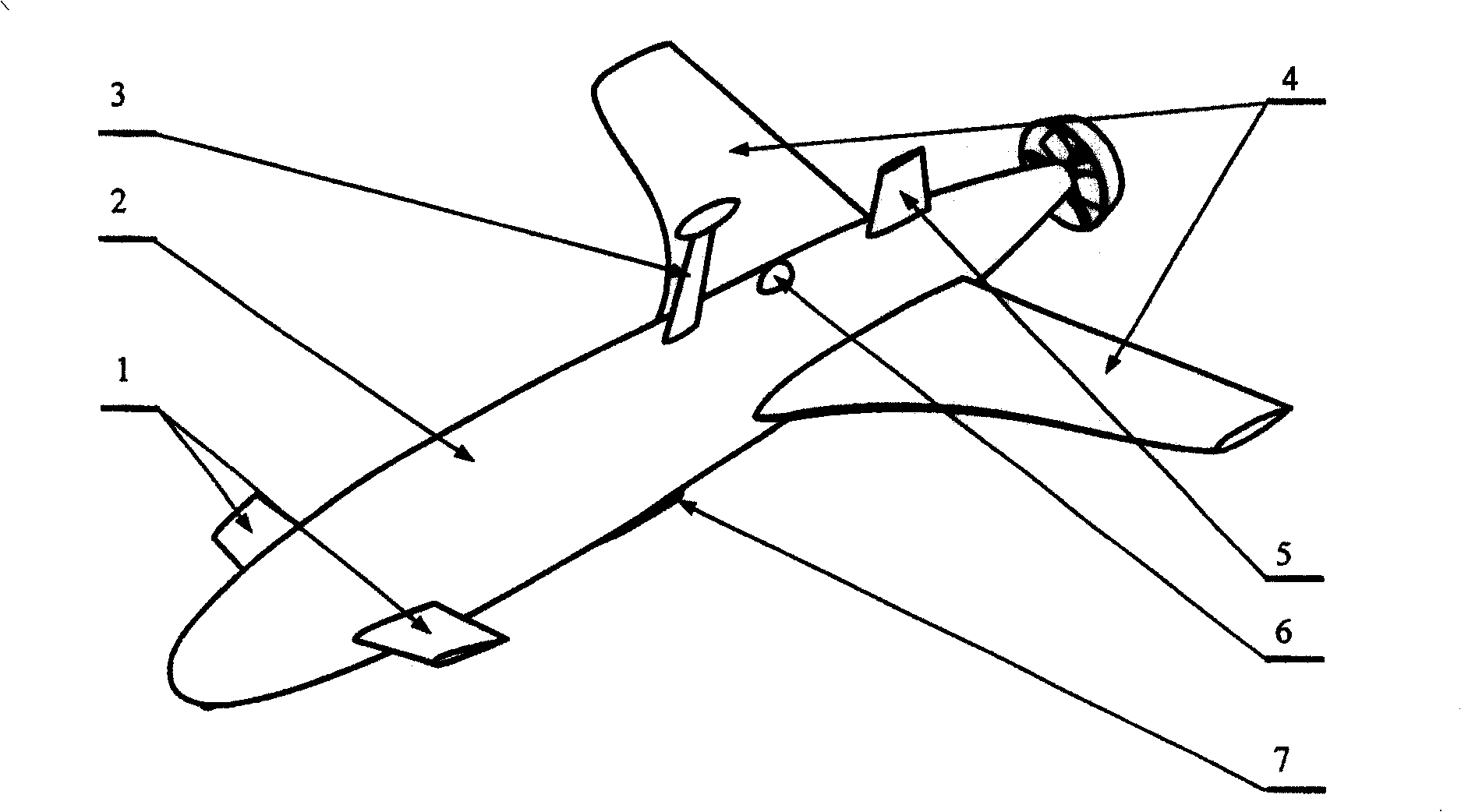
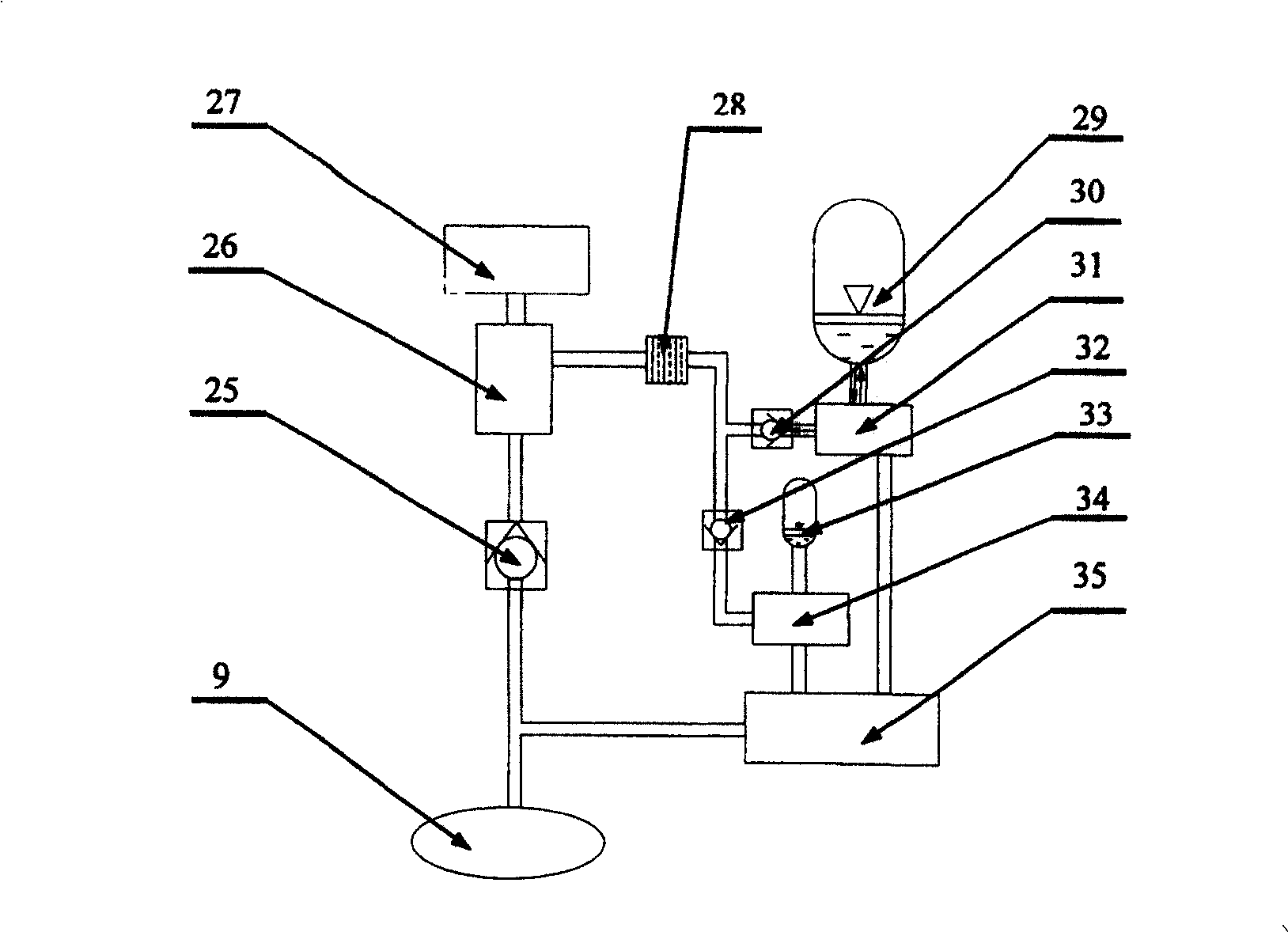
[0031] The hybrid drive underwater self-propelled vehicle of the present invention will be described in detail below in conjunction with the embodiments.
[0032] The hybrid-driven underwater self-propelled vehicle of the present invention includes: a hybrid-driven underwater self-propelled vehicle, which includes the body of the entire vehicle formed by the fairing 2, and it also includes symmetrically arranged on the body respectively. The fixed wing 4 and the vertical tail rudder 5 at the rear, the horizontal fixed bow rudder 1 and a ducted propeller 16 respectively arranged at the front of the body and the tail, the wireless communication module 3 and the underwater acoustics module installed on the back of the body Communication module 6, the altimeter 24 installed on the underside of the body head, the CTD (electrical conductivity, temperature and depth) sensor 7 installed on the abdomen of the body, the collision avoidance sonar 8 installed on the body head; The inside ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More