

Ankle joint rehabilitation training device
A technology for rehabilitation training and ankle joint, applied in the field of medical devices, can solve the problems of complex control system, poor processing and manufacturing, difficult to popularize and apply, etc., and achieve the effects of simple mechanical system structure, good manufacturing and processing performance, and simplified control system design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
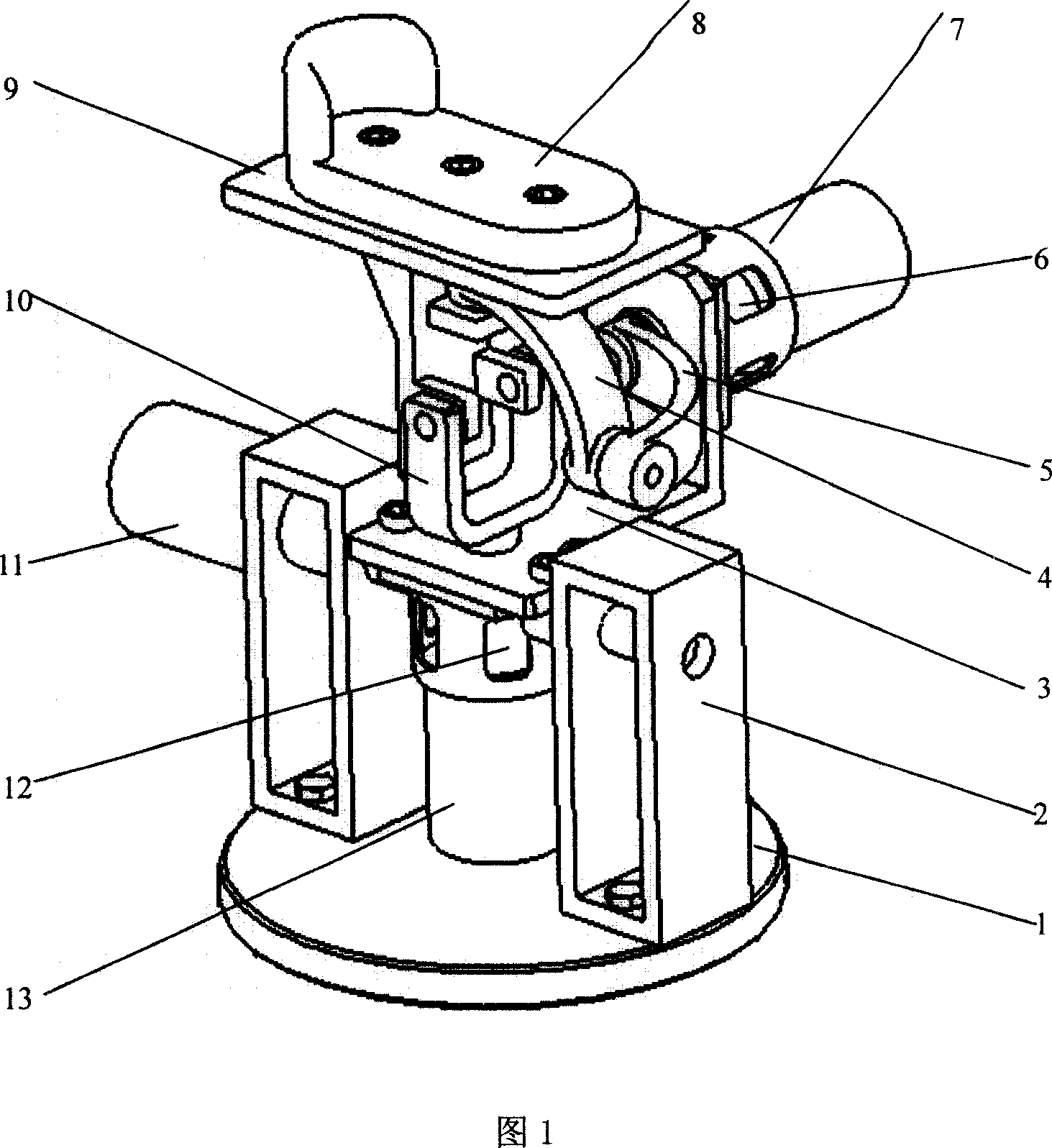
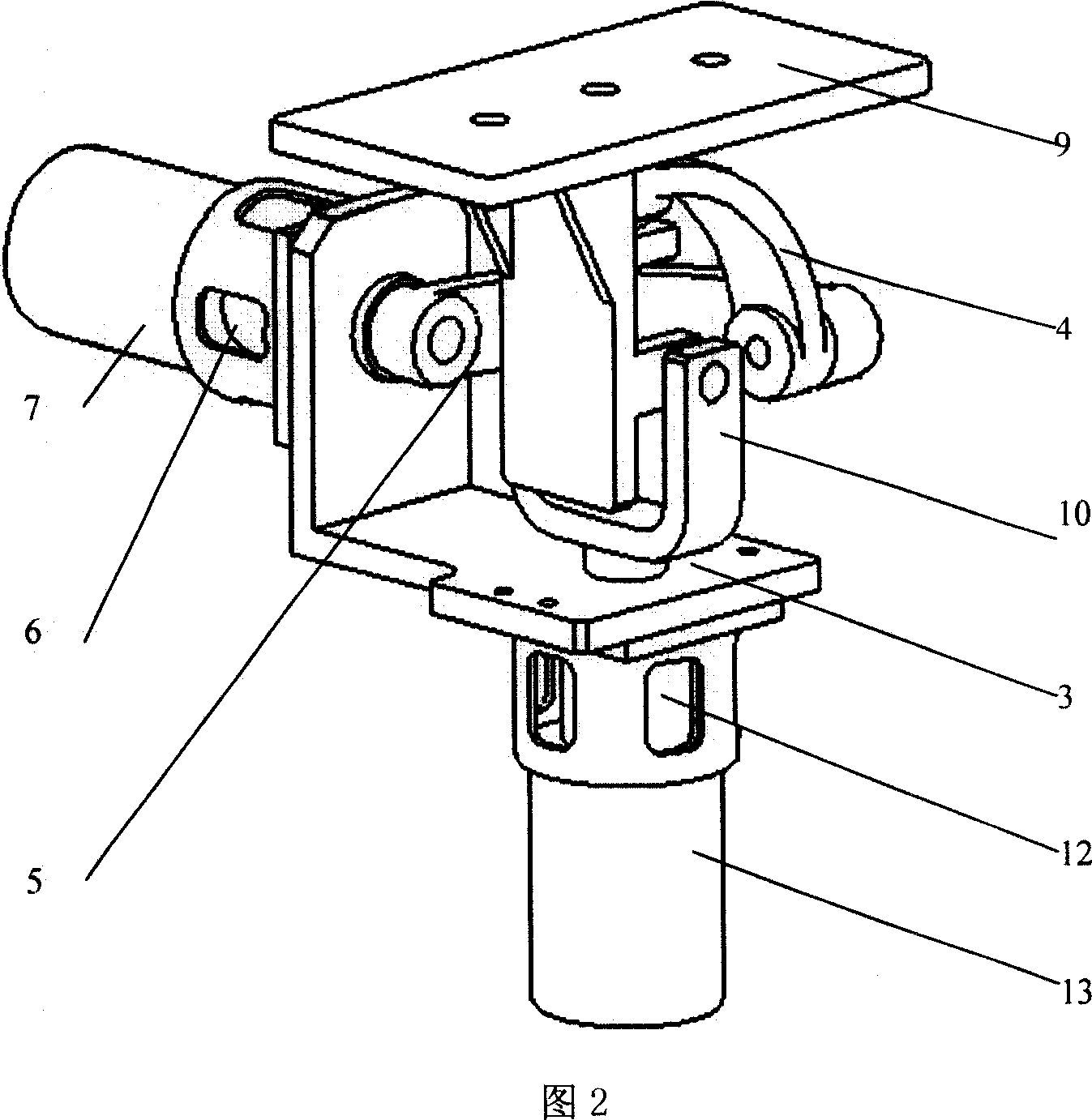
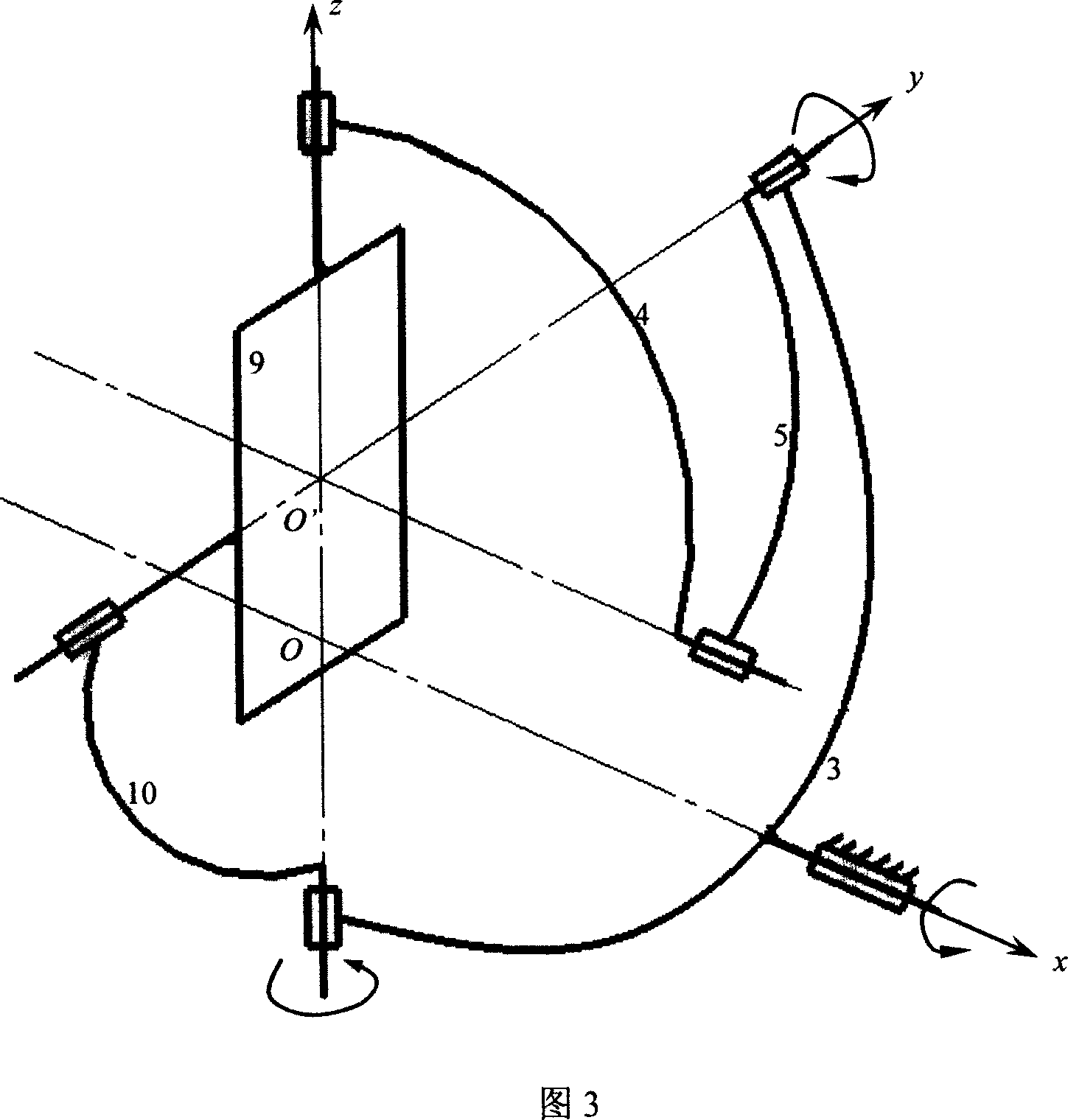
[0023] The structure of the ankle joint rehabilitation training device of this embodiment is shown in FIG. 1 , accompanying drawing 2 and accompanying drawing 3 . It consists of a rotating mechanism with one degree of freedom, a spherical parallel mechanism with two degrees of freedom, and a tray 8. The spherical parallel mechanism is composed of a fixed platform 3, a moving platform 9 as an output component, and 3 connecting rods, one of which is 10 is a "Y"-shaped structural rod, which is connected with the fixed platform and the moving platform through a rotating pair to form a movement branch chain that drives the movement of the movement platform. The movement branch chain is driven by a servo motor 13 through a coupling 12, and the movement platform Driven by the motion branch chain, it rotates around the Y axis. The other two connecting rods 4 and 5 are connected to each other through a rotating pair, wherein the other end of the connecting rod 5 is connected with the s...
Embodiment 2
[0026] The structure of the ankle joint rehabilitation training device of this embodiment is shown in Fig. 4, Fig. 5 and Fig. 6 . The structure of the ankle joint rehabilitation training device of this embodiment is basically the same as that of Embodiment 1, the only difference is that the 2-DOF spherical parallel mechanism mounted on the frame support 2 through the rotating pair is driven by the servo drive motor 11 The X-axis of the rotation axis intersects at the intersection of the two rotation axes of the moving platform - the Y-axis and the Z-axis. Its schematic diagram is shown in Figure 6.
Embodiment 3
[0028] The structure of the ankle joint rehabilitation training device of this embodiment is shown in Fig. 7 , Fig. 8 and Fig. 9 . The structure of the ankle joint rehabilitation training device of this embodiment is basically the same as that of Embodiment 1, the difference is that the two servo motors driving the two parallel branch chains are respectively installed on the two mounting supports of the fixed platform, and the spherical surfaces are connected in parallel. The moving platform of the mechanism output member is driven by two parallel motion branch chains composed of three connecting rods. The two rotation axes of the rotary motion are the X axis and the Y axis, as shown in Figure 8. Through the 2-degree-of-freedom spherical parallel mechanism that the rotating pair is installed on the frame of the rotating mechanism, the axis of the rotary motion driven by the servo drive motor 11 is the Z axis, and the Z axis intersects the intersection of the X axis and the Y ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More