

Minimal access bone operating robot based on 3D mouse operation
A 3D mouse and minimally invasive surgery technology, applied in the field of robotics, can solve the problems of doctors' experience and skill requirements, and achieve the effects of facilitating disassembly and assembly, reasonable layout, and improved motion accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described in detail below in conjunction with the accompanying drawings.
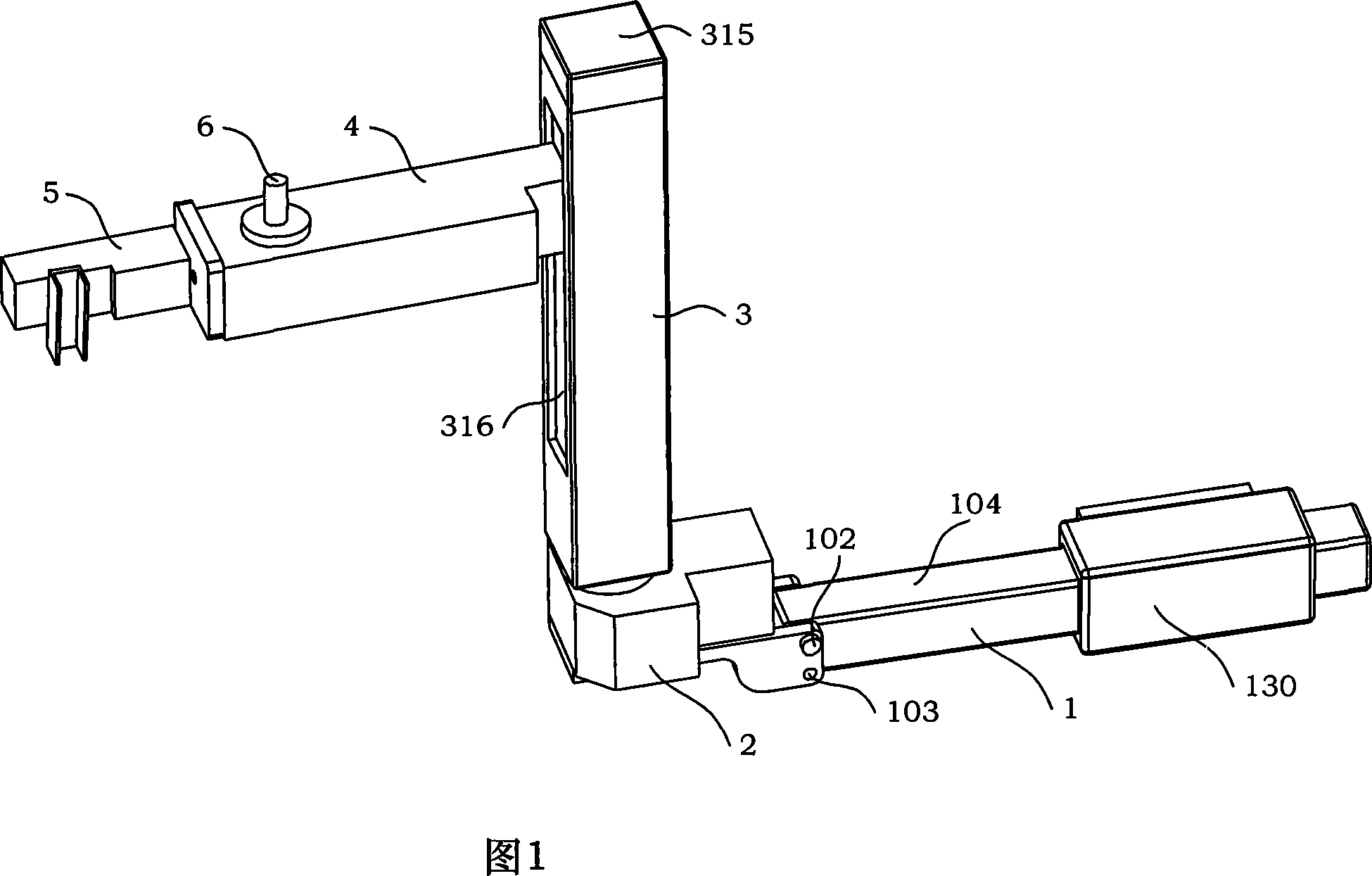
[0016] Please refer to Fig. 1, the present invention is a minimally invasive orthopedic surgery robot based on 3D mouse operation, and is a medical device suitable for fracture reduction and trauma surgery of the lower half of the body. It consists of a lateral movement component 1, a reducer component 2, a vertical movement component 3, a small arm component 4, a wrist component 5 and a 3D mouse 6; the 3D mouse 6 is installed on the small arm housing 401 of the small arm component 4 to slow The base 207 of the reducer assembly 2 is connected with the rotating flange 101 of the lateral movement assembly 1 through screws, the installation base 305 of the up and down movement assembly 3 is connected with the interface 202 of the reducer assembly 2 through two locking rods 210, and the small arm assembly 4 The chute 402 is connected with the C chute 301 of the u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More