

Anthropomorphic robot in series connection
A humanoid robot and robot technology, applied in the field of robotics, can solve problems such as inconvenient operation, robot damage, and high development costs, and achieve the effects of reducing weight, difficulty, and damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
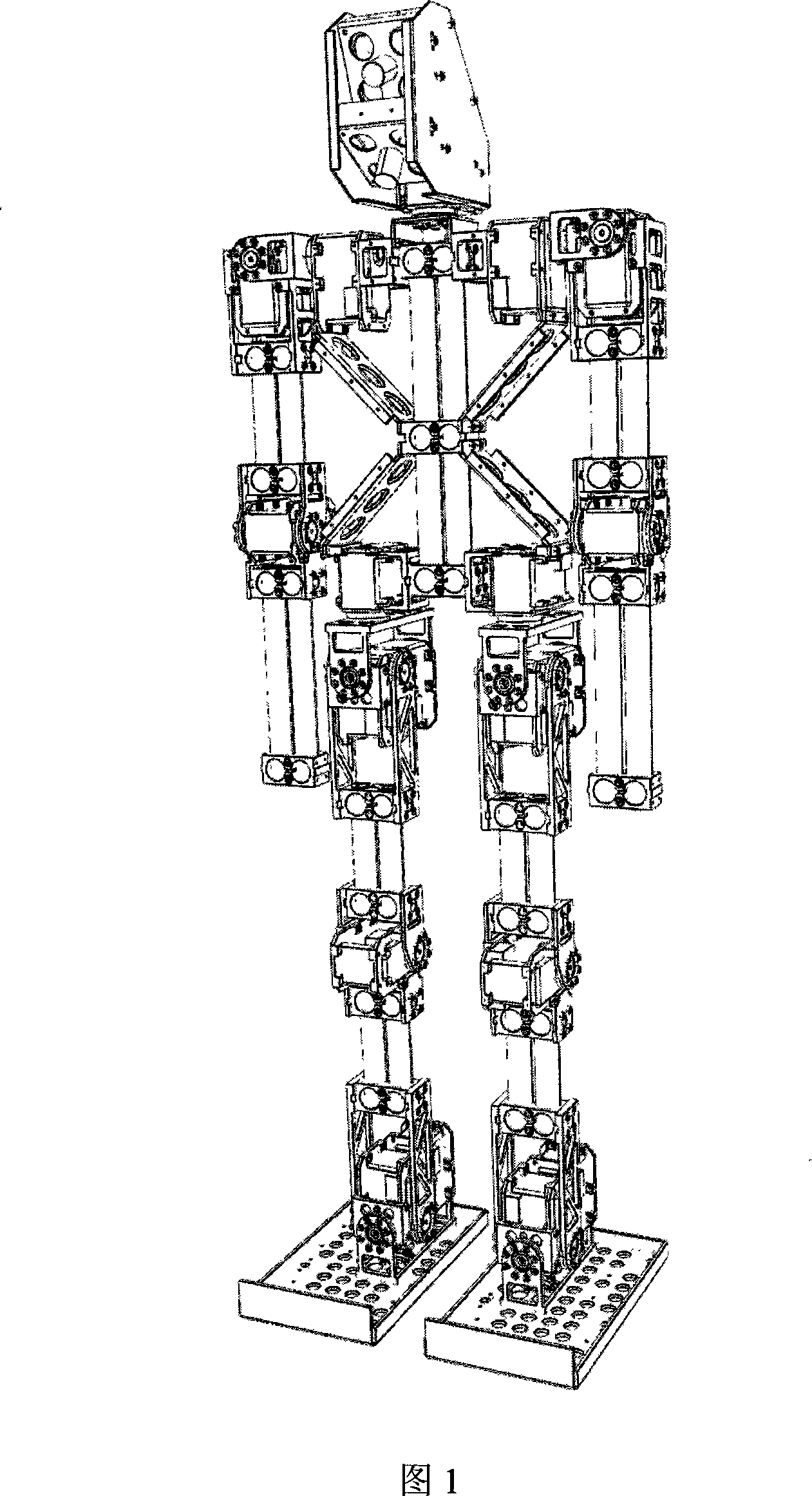
[0017] Fig. 1 is a schematic diagram of the overall structure of the robot of the present invention. The robot as a whole can be divided into four parts, which are the torso, head, arms and legs, and the arms and legs are left-right symmetrical structures. There are 19 degrees of freedom in the whole body of the robot, which are distributed in the following motion joints: 1 degree of freedom of twisting (Yaw) at the neck joint; 1 degree of freedom of forward swing (Pitch) at the shoulder joint, 1 degree of freedom The degrees of freedom are orthogonal to one point; the elbow joint has 1 forward swing degree of freedom; the hip joint has 1 torsion degree of freedom, 1 side swing degree of freedom, and 1 forward swing degree of freedom, and the three degrees of freedom are orthogonal to one point; 1 knee joint Forward swing degree of freedom; the ankle joint has 1 forward swing degree of freedom and 1 side swing degree of freedom, and the two degrees of freedom are orthogonal to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More